Hi Soren,
I modified my Matlab code like you suggested. I tried it once with a space in between and once without.
This is without space in between:
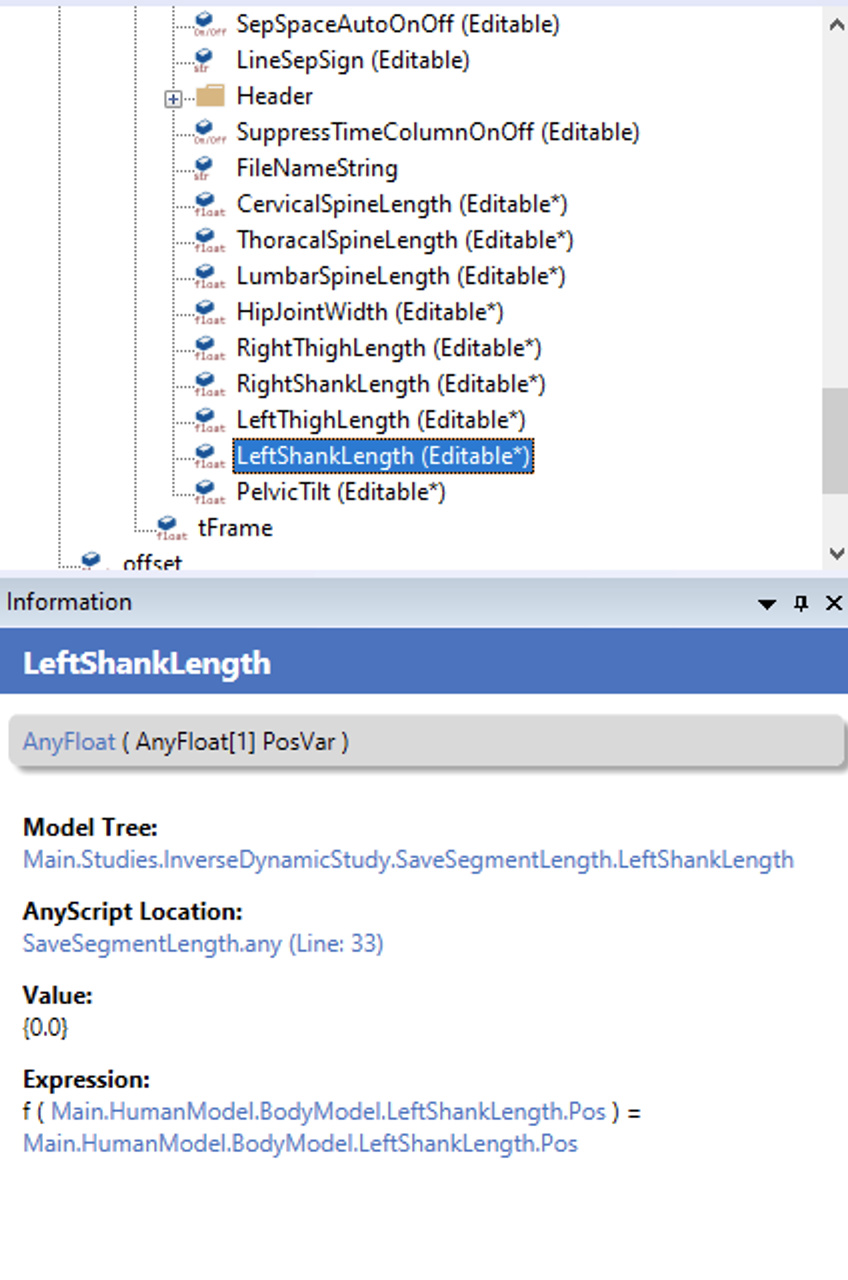
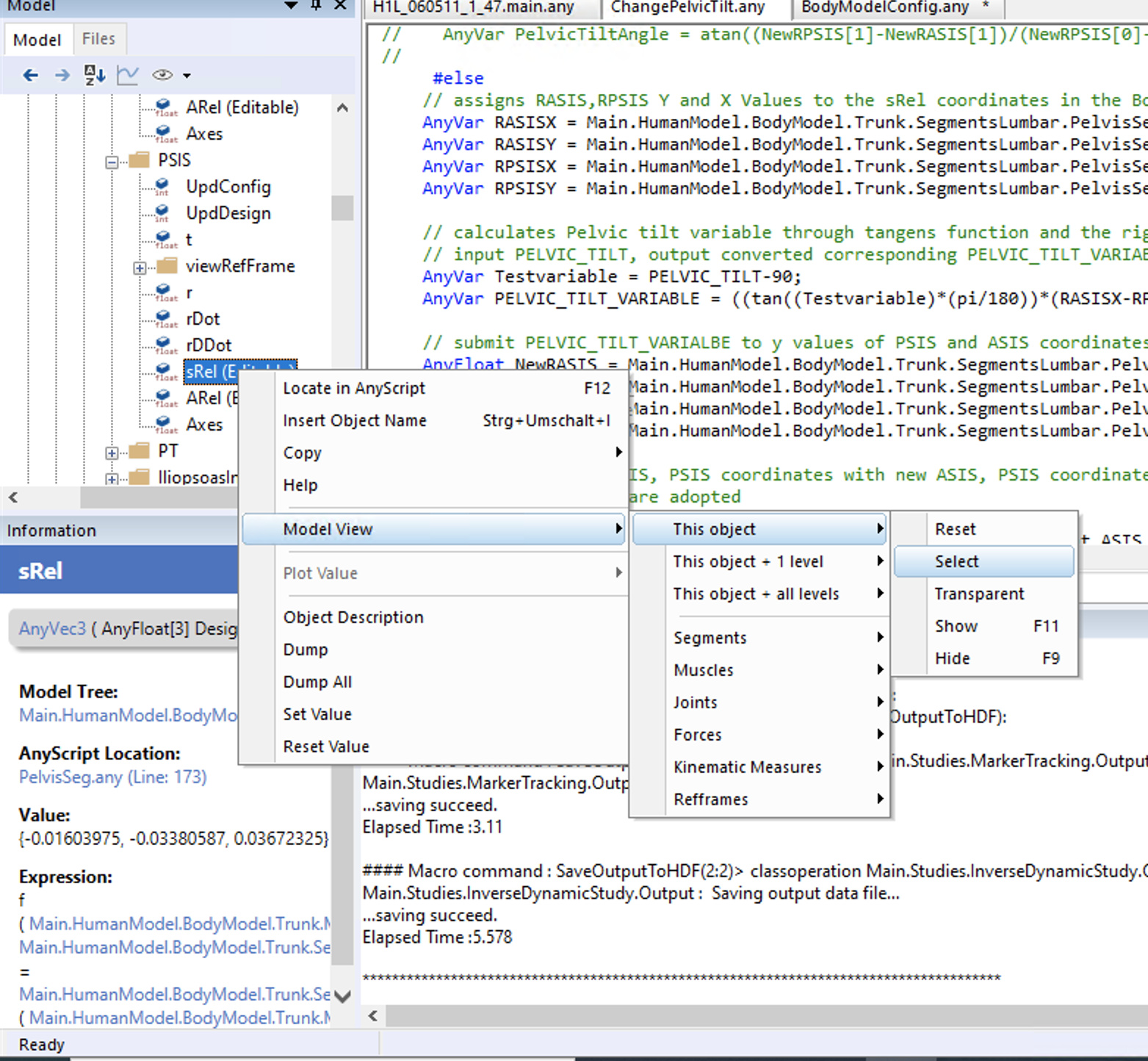
So my Macro for Pelvic Tilt looks like this:
This following errors occurs when I try to run it. It happens during the kinematic analysis.
#### Macro command : mcr(1:1)> classoperation Main.ModelSetup.Views.KinematicView"Set View"
2.0.1.0.0.2) ...Kinematic analysis completed.
2.0.1.0.0.3) ...Dependent variables are fully updated.
2.0.1.0) Kinematic analysis...
Progressing to solve kinematic optimality conditions and hard constraints.
Progressing to solve kinematic optimality conditions and hard constraints.
Progressing to solve kinematic optimality conditions and hard constraints.
Progressing to solve kinematic optimality conditions and hard constraints.
Failed to solve kinematic optimality conditions and hard constraints after 5 fallback attemps.
Constraint violations for study 'Main.Studies.MarkerTracking' :
Constraint #3 is above tolerance 1e-06, error = 0.000001, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L5SacrumJnt.Constraints'.
Constraint #4 is above tolerance 1e-06, error = 0.000005, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L5SacrumJnt.Constraints'.
Constraint #7 is above tolerance 1e-06, error = 0.000002, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L4L5Jnt.Constraints'.
Constraint #10 is above tolerance 1e-06, error = 0.000003, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L3L4Jnt.Constraints'.
Constraint #12 is above tolerance 1e-06, error = 0.000002, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L2L3Jnt.Constraints'.
Constraint #13 is above tolerance 1e-06, error = 0.000004, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L2L3Jnt.Constraints'.
Constraint #14 is above tolerance 1e-06, error = 0.000002, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L2L3Jnt.Constraints'.
Constraint #15 is above tolerance 1e-06, error = 0.000003, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L1L2Jnt.Constraints'.
Constraint #16 is above tolerance 1e-06, error = 0.000004, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L1L2Jnt.Constraints'.
Constraint #17 is above tolerance 1e-06, error = 0.000003, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.L1L2Jnt.Constraints'.
Constraint #18 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.T12L1Jnt.Constraints'.
Constraint #19 is above tolerance 1e-06, error = 0.000005, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.T12L1Jnt.Constraints'.
Constraint #20 is above tolerance 1e-06, error = 0.000004, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.T12L1Jnt.Constraints'.
Constraint #39 is above tolerance 1e-06, error = 0.000005, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.T1C7Jnt.Constraints'.
Constraint #40 is above tolerance 1e-06, error = 0.000005, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.T1C7Jnt.Constraints'.
Constraint #41 is above tolerance 1e-06, error = 0.000004, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.T1C7Jnt.Constraints'.
Constraint #42 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C7C6Jnt.Constraints'.
Constraint #43 is above tolerance 1e-06, error = 0.000003, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C7C6Jnt.Constraints'.
Constraint #44 is above tolerance 1e-06, error = 0.000004, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C7C6Jnt.Constraints'.
Constraint #45 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C6C5Jnt.Constraints'.
Constraint #46 is above tolerance 1e-06, error = 0.000004, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C6C5Jnt.Constraints'.
Constraint #47 is above tolerance 1e-06, error = 0.000005, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C6C5Jnt.Constraints'.
Constraint #48 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C5C4Jnt.Constraints'.
Constraint #49 is above tolerance 1e-06, error = 0.000004, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C5C4Jnt.Constraints'.
Constraint #50 is above tolerance 1e-06, error = 0.000005, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C5C4Jnt.Constraints'.
Constraint #51 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C4C3Jnt.Constraints'.
Constraint #52 is above tolerance 1e-06, error = 0.000004, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C4C3Jnt.Constraints'.
Constraint #53 is above tolerance 1e-06, error = 0.000005, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C4C3Jnt.Constraints'.
Constraint #54 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C3C2Jnt.Constraints'.
Constraint #55 is above tolerance 1e-06, error = 0.000003, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C3C2Jnt.Constraints'.
Constraint #56 is above tolerance 1e-06, error = 0.000005, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C3C2Jnt.Constraints'.
Constraint #62 is above tolerance 1e-06, error = 0.000108, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints'.
Constraint #63 is above tolerance 1e-06, error = 0.000633, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints'.
Constraint #64 is above tolerance 1e-06, error = 0.000071, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints'.
Constraint #84 is above tolerance 1e-06, error = 0.000001, constr. #0 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Ankle.Constraints'.
Constraint #92 is above tolerance 1e-06, error = 0.000029, constr. #3 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.SubTalar.Constraints'.
Constraint #93 is above tolerance 1e-06, error = 0.000003, constr. #4 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.SubTalar.Constraints'.
Constraint #94 is above tolerance 1e-06, error = 0.000003, constr. #0 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Knee.Constraints'.
Constraint #95 is above tolerance 1e-06, error = 0.000002, constr. #1 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Knee.Constraints'.
Constraint #97 is above tolerance 1e-06, error = 0.000020, constr. #3 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Knee.Constraints'.
Constraint #98 is above tolerance 1e-06, error = 0.000005, constr. #4 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Knee.Constraints'.
Constraint #99 is above tolerance 1e-06, error = 0.000003, constr. #0 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.PatellaFemur.Constraints'.
Constraint #102 is above tolerance 1e-06, error = 0.000022, constr. #3 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.PatellaFemur.Constraints'.
Constraint #103 is above tolerance 1e-06, error = 0.000003, constr. #4 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.PatellaFemur.Constraints'.
Constraint #105 is above tolerance 1e-06, error = 0.000164, constr. #0 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Hip.Constraints'.
Constraint #106 is above tolerance 1e-06, error = 0.000038, constr. #1 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Hip.Constraints'.
Constraint #107 is above tolerance 1e-06, error = 0.000052, constr. #2 in 'Main.HumanModel.BodyModel.Right.Leg.Jnt.Hip.Constraints'.
Constraint #111 is above tolerance 1e-06, error = 0.000002, constr. #3 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.Ankle.Constraints'.
Constraint #116 is above tolerance 1e-06, error = 0.000009, constr. #3 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.SubTalar.Constraints'.
Constraint #117 is above tolerance 1e-06, error = 0.000003, constr. #4 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.SubTalar.Constraints'.
Constraint #118 is above tolerance 1e-06, error = 0.000001, constr. #0 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.Knee.Constraints'.
Constraint #121 is above tolerance 1e-06, error = 0.000006, constr. #3 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.Knee.Constraints'.
Constraint #122 is above tolerance 1e-06, error = 0.000002, constr. #4 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.Knee.Constraints'.
Constraint #126 is above tolerance 1e-06, error = 0.000001, constr. #3 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.PatellaFemur.Constraints'.
Constraint #127 is above tolerance 1e-06, error = 0.000007, constr. #4 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.PatellaFemur.Constraints'.
Constraint #129 is above tolerance 1e-06, error = 0.000161, constr. #0 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.Hip.Constraints'.
Constraint #130 is above tolerance 1e-06, error = 0.000030, constr. #1 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.Hip.Constraints'.
Constraint #131 is above tolerance 1e-06, error = 0.000078, constr. #2 in 'Main.HumanModel.BodyModel.Left.Leg.Jnt.Hip.Constraints'.
Constraint #306 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.PelvisSeg'.
Constraint #307 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.SacrumSeg'.
Constraint #308 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L5Seg'.
Constraint #309 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L4Seg'.
Constraint #310 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L3Seg'.
Constraint #311 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L2Seg'.
Constraint #312 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L1Seg'.
Constraint #313 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsThorax.SkullSeg'.
Constraint #314 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsThorax.ThoraxSeg'.
Constraint #315 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C1Seg'.
Constraint #316 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C2Seg'.
Constraint #317 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C3Seg'.
Constraint #318 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C4Seg'.
Constraint #319 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C5Seg'.
Constraint #320 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C6Seg'.
Constraint #321 is above tolerance 1e-06, error = 0.000604, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C7Seg'.
Constraint #322 is above tolerance 1e-06, error = 0.000023, segment constr. 'Main.HumanModel.BodyModel.Right.Leg.Seg.Talus'.
Constraint #323 is above tolerance 1e-06, error = 0.000041, segment constr. 'Main.HumanModel.BodyModel.Right.Leg.Seg.Foot'.
Constraint #324 is above tolerance 1e-06, error = 0.000023, segment constr. 'Main.HumanModel.BodyModel.Right.Leg.Seg.Shank'.
Constraint #325 is above tolerance 1e-06, error = 0.000050, segment constr. 'Main.HumanModel.BodyModel.Right.Leg.Seg.Thigh'.
Constraint #326 is above tolerance 1e-06, error = 0.000025, segment constr. 'Main.HumanModel.BodyModel.Right.Leg.Seg.Patella'.
Constraint #327 is above tolerance 1e-06, error = 0.000009, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Talus'.
Constraint #328 is above tolerance 1e-06, error = 0.000012, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Foot'.
Constraint #329 is above tolerance 1e-06, error = 0.000008, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Shank'.
Constraint #330 is above tolerance 1e-06, error = 0.000016, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Thigh'.
Constraint #331 is above tolerance 1e-06, error = 0.000008, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Patella'.
ERROR(OBJ.MCH.KIN3) : D:\Users\christian.ye\ammr\Tools\AnyMocap\AnyMocapModel.any(41) : 'MarkerTracking.Kinematics' : Kinematic analysis failed in time step 57 : Position analysis is not completed
#### Macro command > exit
And this time with space in between just like in your post:
with the following macro:
/def PELVIC_TILT -6
I end up with a similar error like the first try when I put in the equal to sign. As you can see in the macro command: the other parameters work fine with the equal sign just as simulations with positive pelvic tilt variables. It somehow only appears when I use negative pelvic tilt variables. If I directly run the simulations in AnyBody I don't experience any errors with /def PELVIC_TILT -6. I'm not sure yet if this error is due to Matlab or AnyBody.
#### Macro command > load "Subjects\H1L\one_leg_stance\H1L_060511_1_24\H1L_060511_1_24.main.any" /def BM_LEG_MODEL=2 /def SUBJECT_SPECIFIC_ADAPTION=2 /def MARKER_SETUP=2 /def MUSCLE_RECRUITMENT=3 /def BM_LEG_MUSCLES_BOTH=1 /def BM_LEG_STRENGTH_INDEX=1 /def PELVIC_TILT -6
Loading Main : "D:\Users\christian.ye\AB_OL_HJF_Validation\Subjects\H1L\one_leg_stance\H1L_060511_1_24\H1L_060511_1_24.main.any"
Scanning...
Warning : arguments has no effect :
-6
Parsing...
ERROR(SCR.PRS11) : D:\Users\christian.ye\AB_OL_HJF_Validation\Setup\ChangePelvicTilt.any(11) : '*' unexpected
Model loading skipped
#### Macro command > operation Main.RunAnalysis
Error : Main.RunAnalysis : Unresolved object.
#### Macro command > run
Error : run : command unexpected while operation is not selected.
#### Macro command > exit