Hello, I have an issue with the baseline drift (offset) correction from the force plate analog channel data. Please see the figure copied below (Figure 1) which shows how AnyBody reads the analog channel data from my .c3d file. It shows the offset in my analog force plate data (vertical component of force plate data is not zero during stance phase). I have got the "Baselines" correction values for each analog channel using Visual3D (Figure 2) to fix the drift/offset. Currently, I do not have access to the professional version of Visual3D to update the analog channel data with "Baselines" correction values. I am wondering if AnyBody has any option to apply the "Baselines" values to correct the drift in analog channels so that AnyBody can receive the drift-free force plate data.
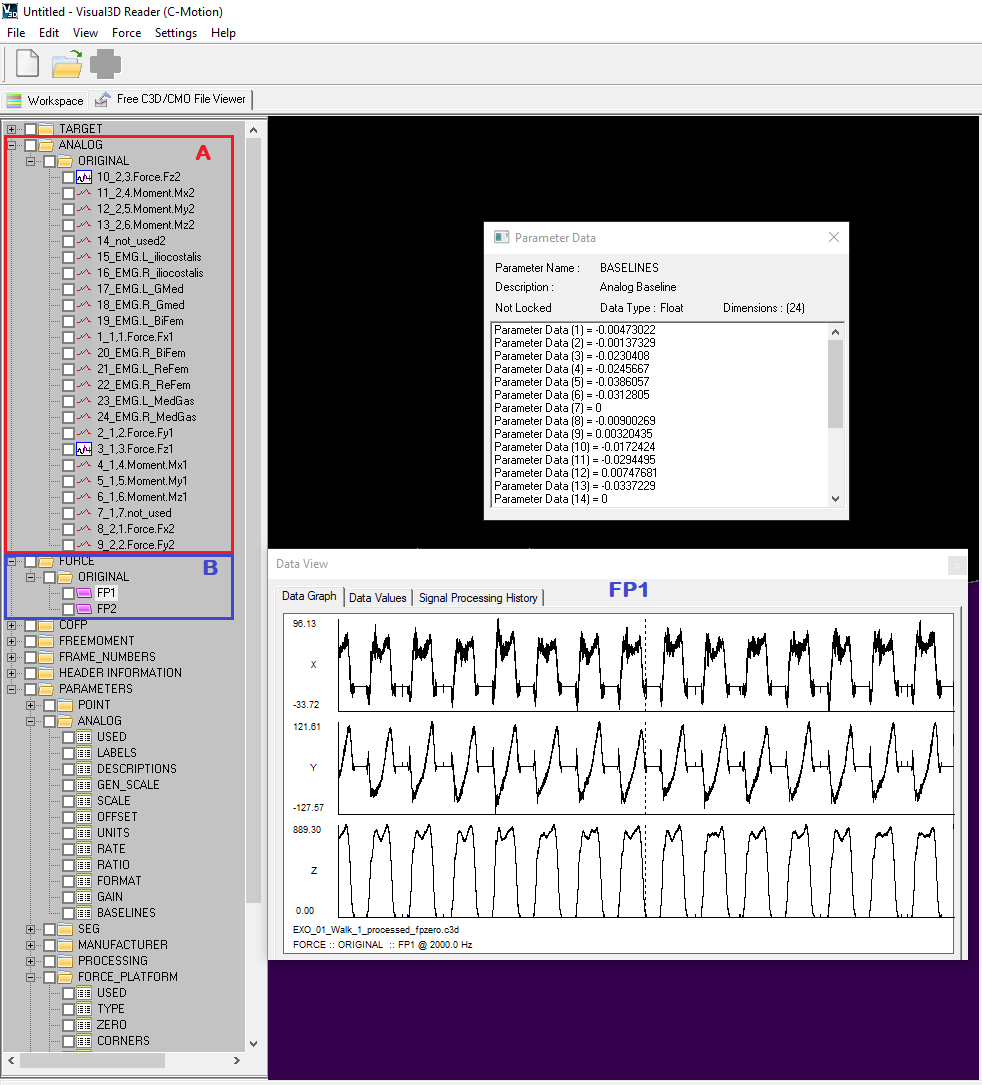
I also have the processed force plate data in which drift is removed (FP1 & FP2 in Figure 2). However, I noticed that AnyBody only reads analog channel data, not the force plate data processed in Visual3D (FP1 & FP2).
I have alternatively used "Mokka" application to remove the baseline drifts in analog channels by selecting a range of reference frames. In this case, AnyBody can read the drift-free analog data, however, this results in different magnitude and temporal profile in the predicted joint reaction forces between left and right leg for a normal walking condition. Ideally, I did not expect that kind of variation in JRFs between left and right leg for a normal gait. Since I had to use different reference frames for left and right limb force plates, this might resulted in inconsistent (and inaccurate) drift correction between left and right leg followed by different magnitude and temporal profile of joint reaction forces (JRFs) in left and right leg.
I would highly appreciate your feedback on this regard. It would be great to know if I can apply the drift correction "Baselines" values within AnyBody. I would also appreciate your suggestion on any alternative way to fix this issue.
Figure 1:
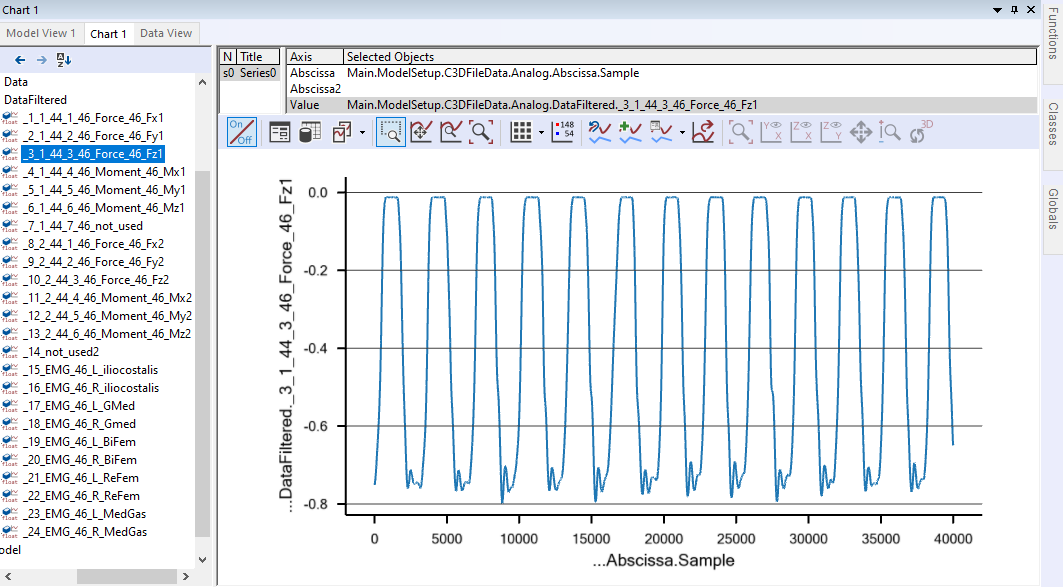
Figure 2: