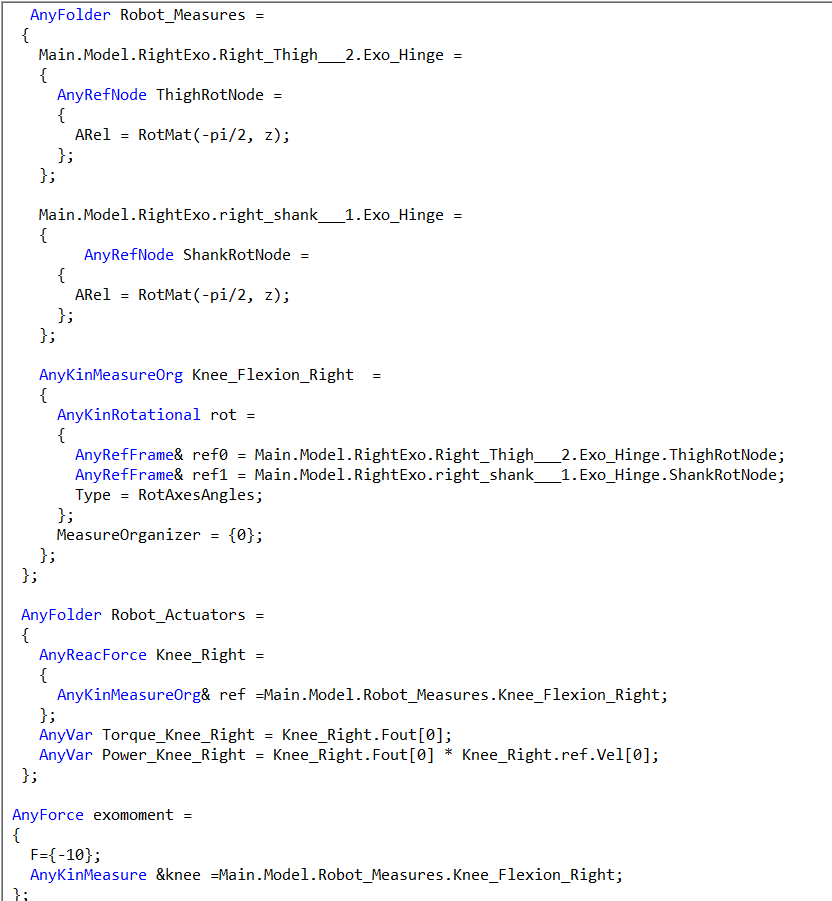
I have used the ContactElement to connect the human and the exoskeleton. Now I am going to add moment to the exoskeleton. When I add the following code, the human muscle force and the normal force of the ContactElement will change. But when I adjust the F In the AnyForce, there is no change in muscle force and normal force. Could you explain why adjusting F has no effect on output? Thank you very much.
The force has no effect because you have an AnyReacForce ("Robot_actuators.Knee_Right") applied to the same DOF you apply the torque on... so the AnyReacForce force will carry the applied torque and muscles will not feel the this torque.
Thank you very much for your reply, I forgot to comment out the AnyReacForce. Now when I adjust the value of the exoskeleton moment, the output has changed. But no matter how I adjust the value of the moment, I find that the value of the rectus femoris is basically unchanged, but the values of other muscles will change. Is it normal for the value of the rectus femoris to change very little? Thank you in advance.
Rectus femoris spans both hip and knee joint, it is possible that the force it creates in his model is dominated by the torque needed around hip and not so much the knee, so when you change need for knee torque you may not see it changing so much.