Hi,
Taking LowerExtremity.any as an example, I want to get the angle between the shank and the ground. I obtained it in the following way, but the result seems to have some problems, and the relationship with the movement does not match.
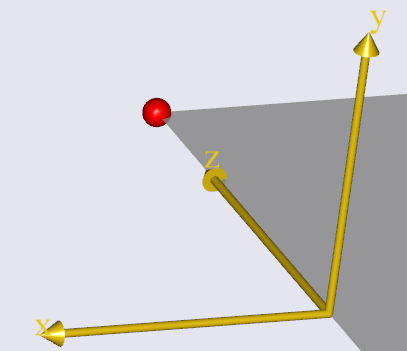
First, I defined a new coordinate system in the world coordinate system and made it consistent with the shank coordinate system.
AnyFixedRefFrame GlobalRef ={
Origin={0,0,0};
AnyDrawRefFrame drw={ScaleXYZ=0.2*{1,1,1};};
AnyRefNode GL ={
sRel = {0,0.3,0};
ARel = {{-1,0,0},{0,0,1},{0,1,0}};
AnyDrawRefFrame drw={ScaleXYZ=0.2*{1,1,1};};
};
Here are the coordinates of the GL point,
This is the coordinates of the shank,
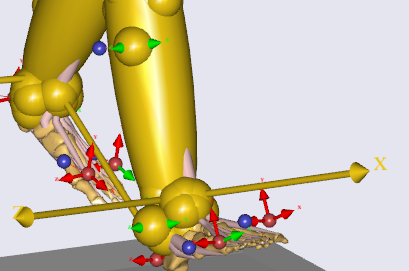
Then, I defined the angle between the lower leg and the ground in the following way in the output of the result. The ShankJoint is a point I defined on the mid-section of the shank.
AnyFolder LegGroundAngle = {
AnyKinMeasureOrg LegGroundAngle = {
AnyKinRotational LegGround ={
AnyRefNode &Shank2Node = Main.HumanModel.BodyModel.Right.Leg.Seg.Shank.ShankJoint;
AnyRefNode &Global = Main.EnvironmentModel.GlobalRef.GL;
Type=RotAxesAngles;
};
};
};
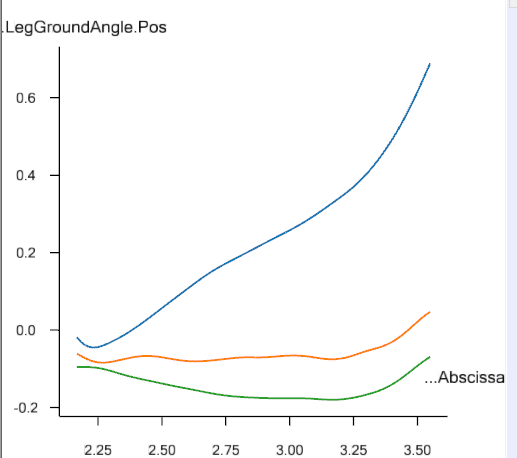
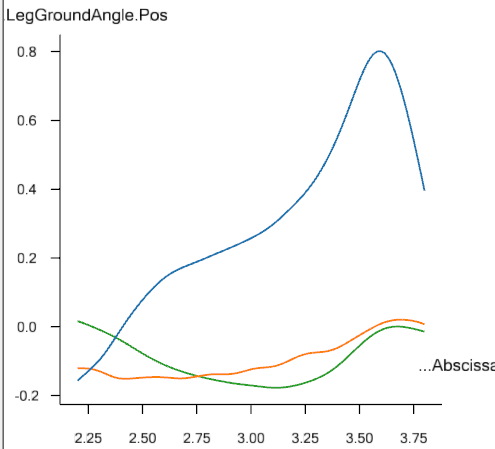
In this way, three curves are obtained, but I find that these three curves and the movement trend do not seem to be aligned, and I cannot obtain the angle information of the calf and the ground that I want. Could you please tell me how to get what I want?
I would be very grateful to hear from you.
Best Regards.
Xu