hello sir
There is a problem with contact.
Turn the driver to make contact between stl and stl, but it does not make contact, but passes through.
Raising the pressure modulus does not solve the problem. Can you give me some tips on what to do?
hello sir
There is a problem with contact.
Turn the driver to make contact between stl and stl, but it does not make contact, but passes through.
Raising the pressure modulus does not solve the problem. Can you give me some tips on what to do?
Hi, weedeng
This seems cool, how did you get the motion of mobile linear?
Regards,
Lee
Hello Lee !
Can you tell me your e-mail? I will send my script
Hello,
If you use regular kinematics solver it will go through since this is what you specify. If you want the contact to stop the movement you need to be solving a different problem.
Please go through tutorials:
Regards,
Pavel
Thank you for your answer.
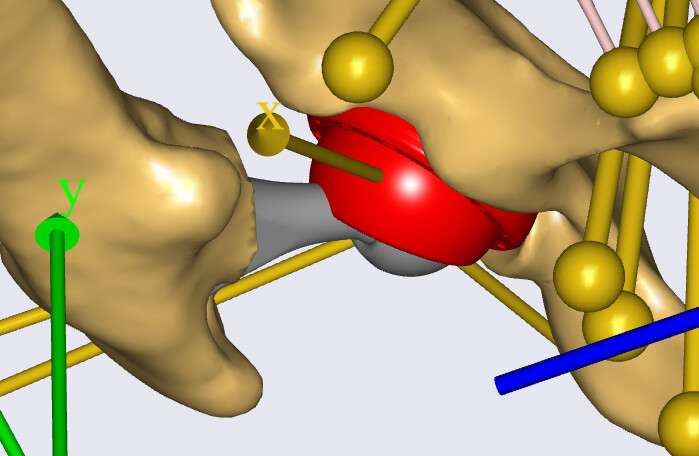
The picture was taken as an example to show the movement of the implant.
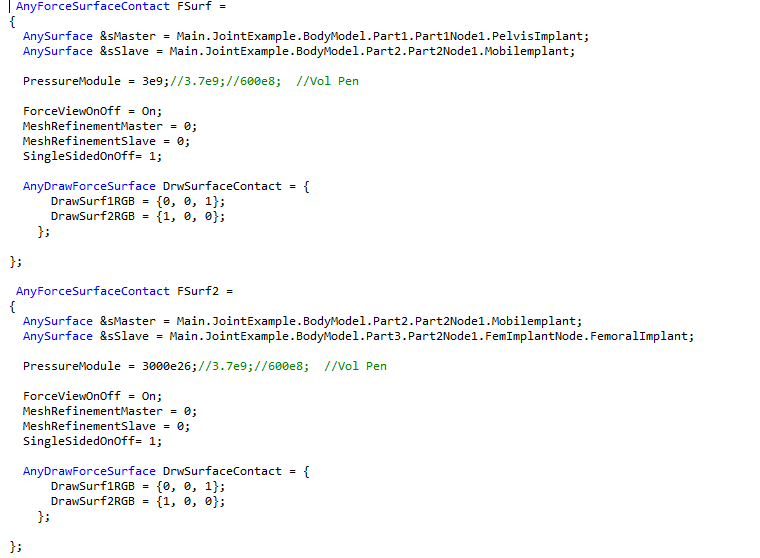
I contacted the two stl using AnyForceSurfaceContact, but it penetrates as shown in the picture below. Is there any way?
Could Degenerate triangels found warnings be a problem?
Regards
weedeng
It is not possible to answer your question. You provide no details of what you are doing.
We don't know what model you are running (is it one of ours from the AMMR or you made something yourself?). How is the hip joint defined (we would want to see the code)? Do you use FDK solver? Do you understand what it is? Do you run InverseDynamics analysis to compute movement? And what kind of operations do you run in general? I believe you really need to do the tutorials (link in my previous post).
The definition of the contact forces seem to be correct. The Degenerate Triangles could cause problems, but of a different kind. You can search this forum for 'Degenerate Triangles' to find how to resolve this problem.
This topic was automatically closed 125 days after the last reply. New replies are no longer allowed.