Hello,
I measured subjects walking on an inclined and declined (+/-4°) dual belt treadmill with force plates integrated in the treadmill (GRAIL, Motek Medical B.V., Houten, Netherlands). The system was calibrated with the treadmill in an even position.
I’m using the Plug-in-gait_Simple LowerExtremity model from the MocapExamples in AMMR 2.3.1. Is it possible to add an incline to the treadmill in this model? I tried to run the analysis with following force plate settings:
Main.EnvironmentModel.ForcePlates =
{
ForcePlateAutoDetection Plate1(
PLATE_NO=1,
HeightTolerance = 0.07,
VelThreshold = 2.2,
FORCEPLATE_TYPE = 2,
ALLOW_MULTI_LIMB_CONTACT = OFF
) = { GroundVelocity = {0,0.9,0};
};
ForcePlateAutoDetection Plate2(
PLATE_NO=2,
HeightTolerance = 0.07,
VelThreshold = 2.2,
FORCEPLATE_TYPE = 2,
ALLOW_MULTI_LIMB_CONTACT = OFF
) = { GroundVelocity = {0,0.9,0};
};
};
This works for the even position but not for an inclined/declined treadmill, as shown below.
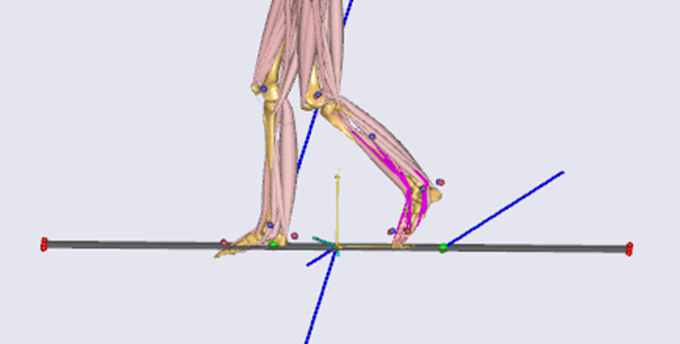
Is it possible to change the force plate settings according to the incline within the model? I’ve read the post “MoCap on a ramped treadmill” but was wondering if any other solution was found since 2022.
Thank you in advance for any insights or suggestions!