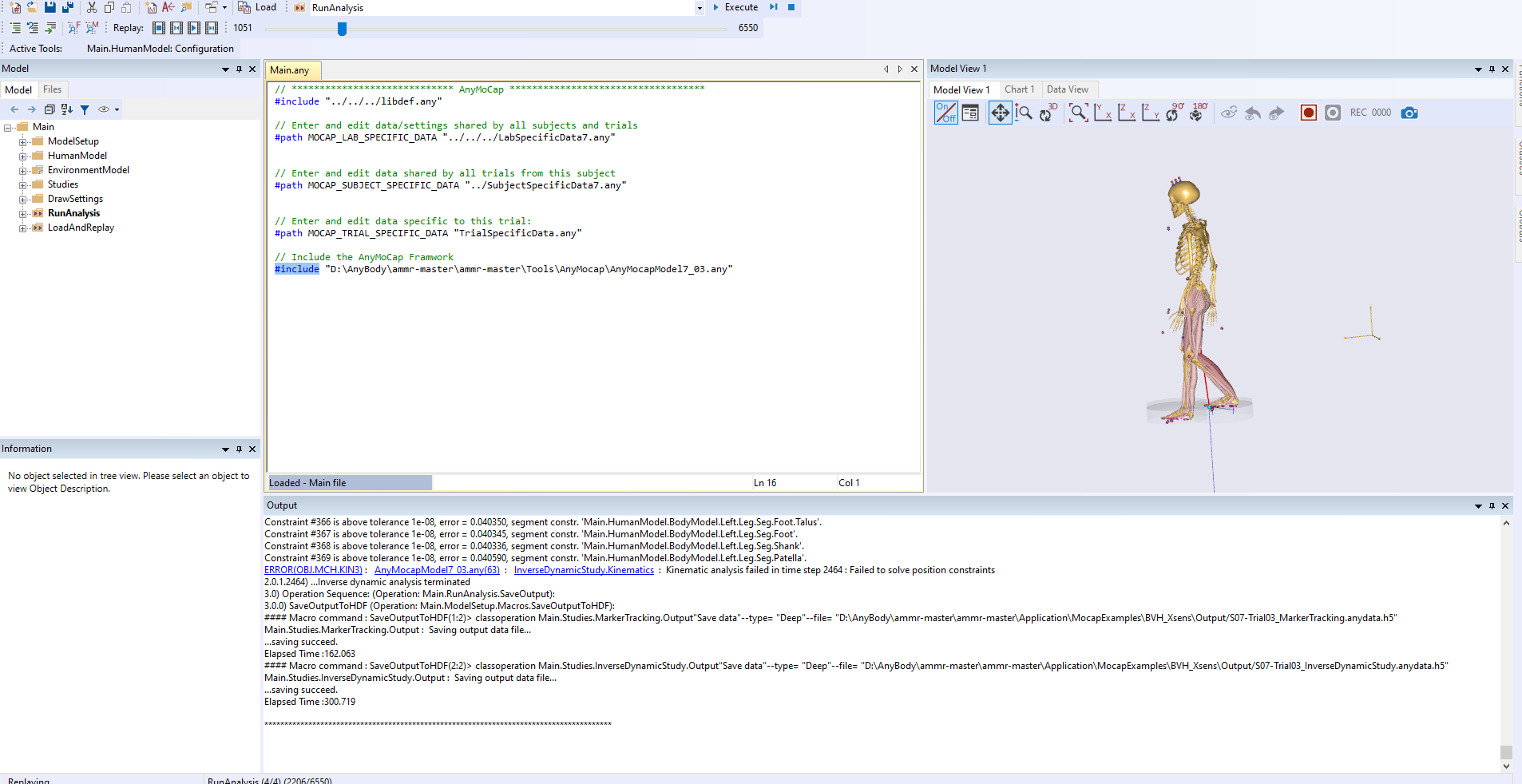
That seems to be an error in kinematics and I am not sure why that is happening. It looks like the left leg is bent in a strange way, or maybe that's just my impression from the image. Can you check if the kinematics in the bvh file is reasonable at this frame. There could be something odd about this posture that is breaking the kinematics.
Good morning, I'm sorry I'm only replying now, I've been analyzing the bvh file and the left leg seems to be tilted, it may have been some sensor that perhaps wasn't placed correctly. I think it's best to discard this test.
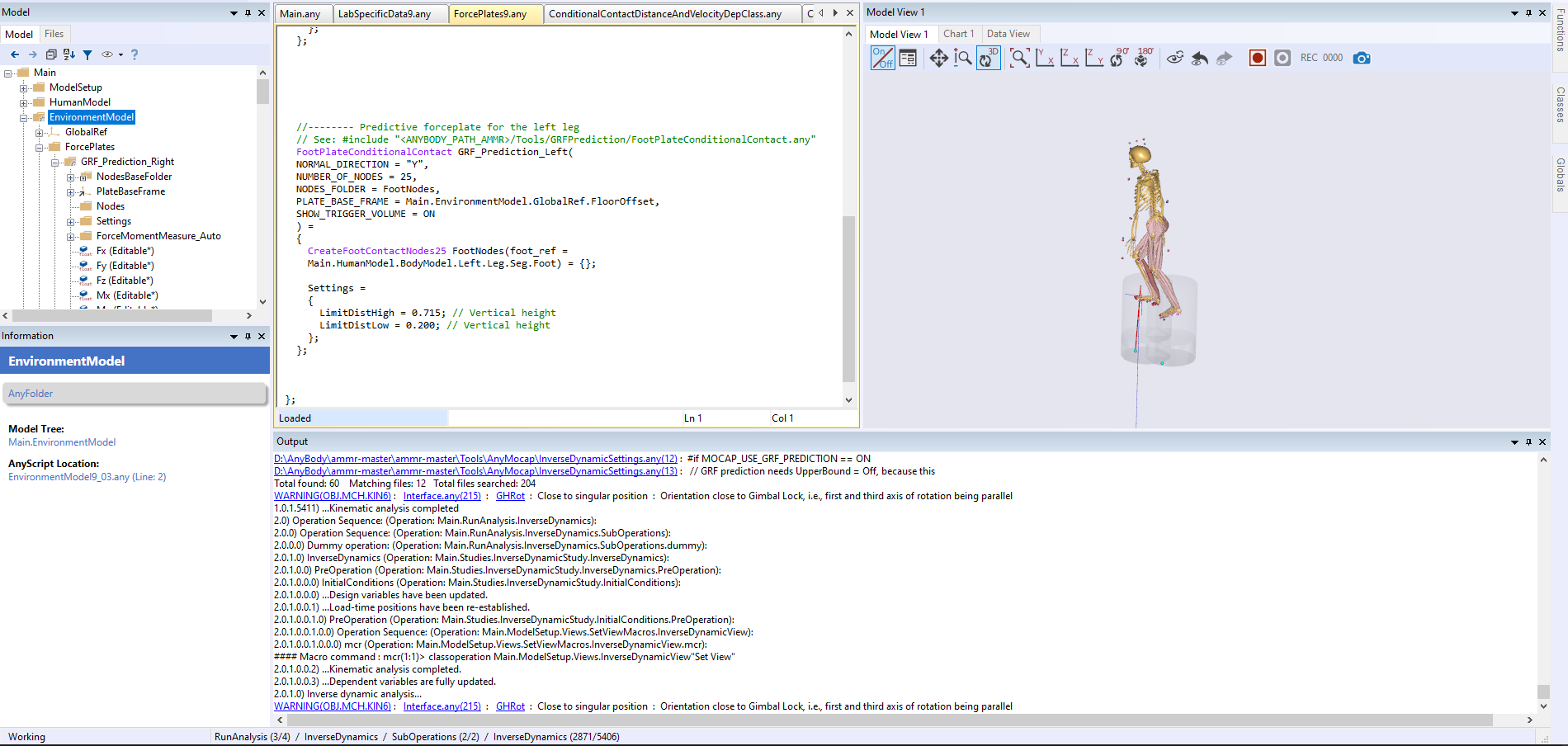
Good afternoon, I apologise for bothering you again, regarding the ascent and descent of stairs, I've been changing the minimum and maximum distance between the foot and the surface and it already detects the ground reaction forces. Regarding the following line (// See: #include "<ANYBODY_PATH_AMMR>/Tools/GRFPrediction/FootPlateConditionalContact.any" ), for ascending and descending stairs, is it necessary to uncomment or do I keep it the same, as shown in the attached image?
You can leave the line as it is. It is just a shortcut to take you to the definition of the class template, where you can read more about all the settings available.