Hello,
I would like to characterize the effect of applying an assistive torque at the hip joint during walking with a crutch device, using the musculoskeletal parameters. I have two musculoskeletal models developed based on mocap data: 1. Walking without a crutch (normal walking), and 2. Walking with a crutch at a matched gait speed. Now, my goal is to apply an assistive torque at the hip joint for the 2nd model (Walking with a crutch), and compare between the conditions to characterize the effect of an assistive torque. Finally, I would like to determine the optimum amount of torque needed to walk easier. I have a few questions when I am applying this torque. I would appreciate your feedback on this.
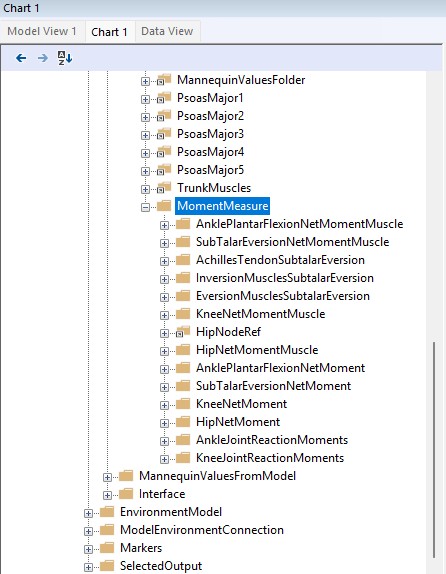
- I have gone through the AnyBody webinar on "Simulation-Driven Conceptual Design of Exoskeletons" from March 28, 2022. It shows how to apply the AnyReac Force and define the ideal amount of torque needed to obtain the optimum effect. Finally, 'reaction moment' (knee) is compared against 'knee angle' to determine the equation. Finally, this equation is used to apply the force directly to the model and simulate again (This force equation is similar to a torsional spring, and so we finally applied a spring force here. Please let me know if I understood the process correctly). I have been able to locate the knee reaction moment from model, but I don't see the hip reaction moment here (please see the screenshot attached below). Since, my goal is to do this for a conceptual hip exoskeleton, how can I add/find the hip reaction moment from the model? I would highly appreciate your feedback on how I can optimize the assistive torque for a simulation-driven conceptual hip exoskeleton.
-
Since I am applying the torque to the model based mocap data for walking with the crutch, how do you see the effect of this torque when we compare between conditions? Since the mocap data will be the same, is this an ideal approach to characterize the effect of hip torque based on musculoskeletal parameters, e.g. joint angles from the inverse dynamics analysis? Whatever change we notice in the musculoskeletal parameters for this model, can we consider this as an effect of assistive torque only?
-
I would like to confirm the units of assistance that we provide in the "AnyReac" or "Spring" force approach in the "Simulation-Driven Conceptual Design of Exoskeletons". Apparently, we are applying an assistive force here, so the units would be in Newtons. Please correct me if I am wrong.
I would highly appreciate your feedback. Please let me know if you have any questions. Thank you very much in advance.
Best Regards,
Arif