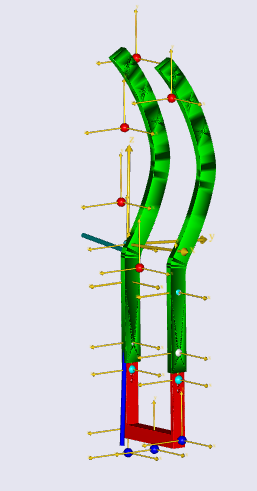
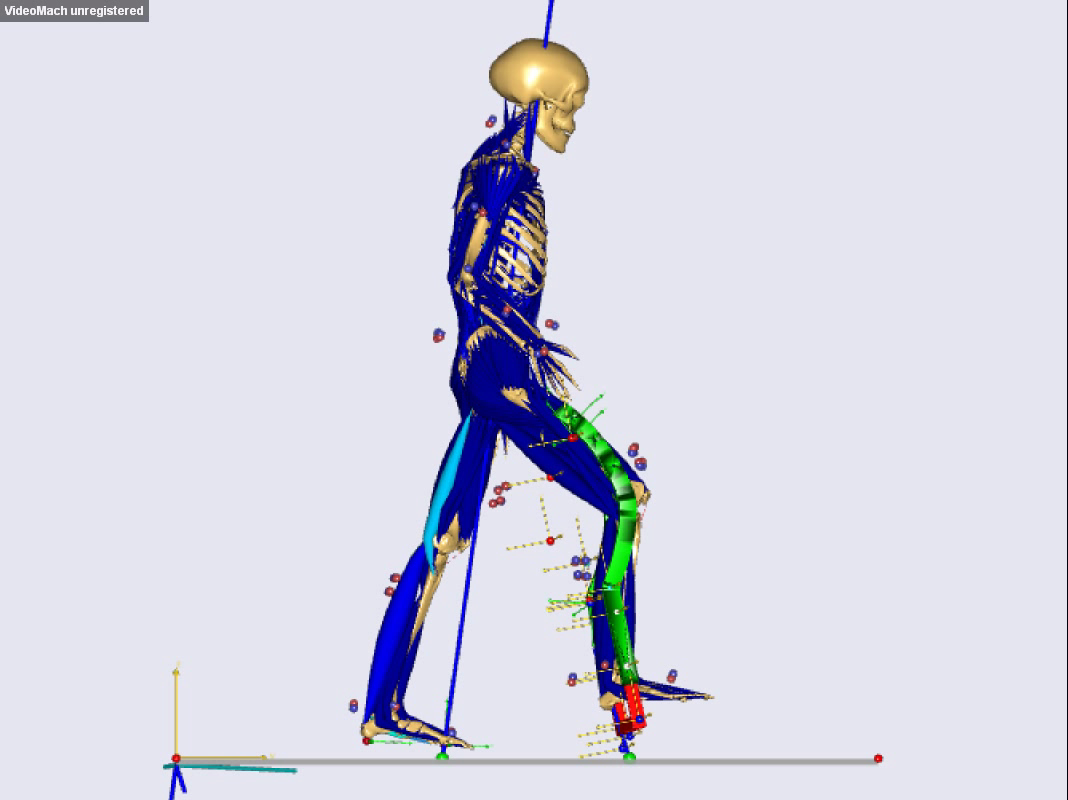
I have developed a model where the subject walks with a crutch device (hands-free crutch - brace). Please see the picture attached here. Subject wears this device on the right leg. As the subject walks with the device, the right leg remained elevated off the ground, while the device makes contact with the force plate on the right side. The left leg makes regular contact with force plate.
This crutch device has three parts: 2 side bases (green) and footrest (red). Footrest is used to adjust the height of the subject. These parts don't move relative to each other during movement. So, I used fixed joints to attach these parts of the device with each other. I used coupling points (attachment points) on thigh and back of the shank to attach the device to the human model. Attachment points were identified using marker locations from experiment.
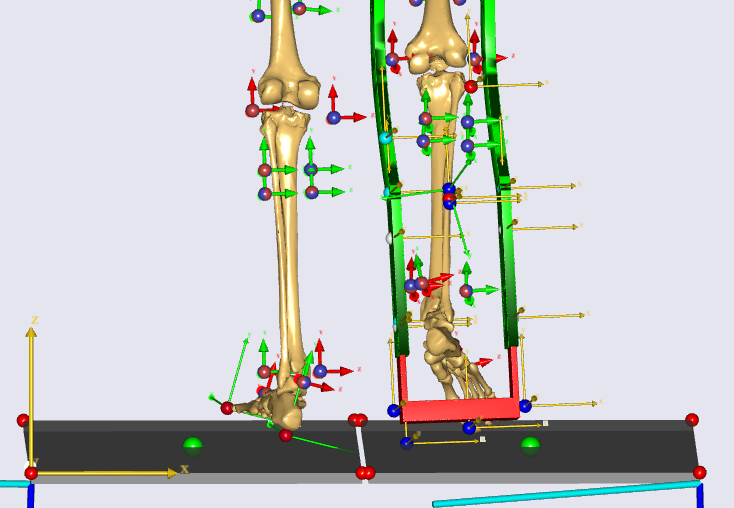
Now, in order to define the contacts on right side, I created two contact nodes on the footrest (corresponding to CONTACT_NODE1 = HeelContactNodeLow and CONTACT_NODE2 = ToeLateralContactNode) and updated the ForcePlates.any script accordingly. I looked at how the subject makes contact with the footrest on right side and adjusted the location of these nodes by looking at the ground reaction force on right side.
On right side:
CONTACT_NODE1 = footrest_contact_node_medial,
CONTACT_NODE2 = footrest_contact_node_lateral,
LIMB1=Main.EnvironmentModel.FL_FootRest.Seg.FL_FootRest,
LIMB2=Main.HumanModel.BodyModel.Left.Leg.Seg.Foot,
Please see the pictures attached below. This model runs fine. I have also looked at how the force plate detects contact on the right side and it matches the experimental ground reaction force.
AnyVar GRF_Right = Main.EnvironmentModel.ForcePlates.Plate2.ForcePlate.Force.Fout[2]*Main.EnvironmentModel.ForcePlates.Plate2.ContactDetectionLimb1.NodeWithInBox.WithinBoxAndVelBelowThreshold/Main.HumanModel.Anthropometrics.BodyMass/Main.ModelSetup.LabSpecificData.Gravity[2];
I would like to confirm if this process looks correct. I am wondering if I need to do anything else with the model to make sure the force is transmitted from the footrest (device) to the right leg correctly. This device is intended to off-load the lower leg (shank) and manufacturers report 100% non-weight bearing on the shank. Model-predicted knee and ankle joint reaction forces are reduced by 60% and 97% respectively. In addition, model predicts negligible medial gastrocnemius muscle activity which is in agreement with experimental EMG data. Model shows good agreement on muscle activity for hip (Gluteus Medius), back (Iliocostalis) and lower leg (Medial Gastrocnemius) muscle. Generally, I have noticed variability on the upper leg muscle activity (Biceps Femoris & Rectus Femoris) compared with EMG data, i.e. variability among different subjects.
I am wondering if I have missed something here on the right leg on how the force is transmitted on the right side. I would highly appreciate your feedback on this. Please let me know if you need additional information.
[N.B. In the experiment, this device is fastened to the thigh securely and only allows sliding motion relative to the shank. I attached the device to the leg to account for this by constraining all three directions on thigh attachment node and allowing only one direction on shank attachment node. Please let me know if I need to do anything here as well]
Thank you in advance.