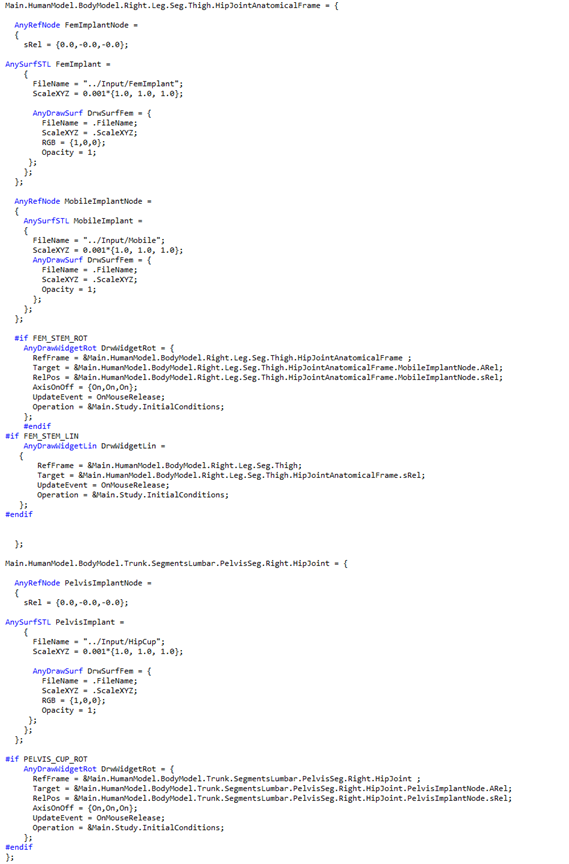
It seems like you are trying to refer to an AnyKinLinear as an AnySphericalJoint. When you see this error while loading the model, you should also get a link to the lines in the code where this problem is coming from. Could you please copy the line and a few lines above and below so we can see what exactly you have done?
and change joint in “hipexchange.any” for make new hip joint and driver
Conventional model has no problem. it just do exchange body, add two implant and connect both node using exist joint. conventional model use same joint with intact AMMR
Intact model = pelvis <-> femur connected
conventional implant model = pelvis implant <-> femur implant connected
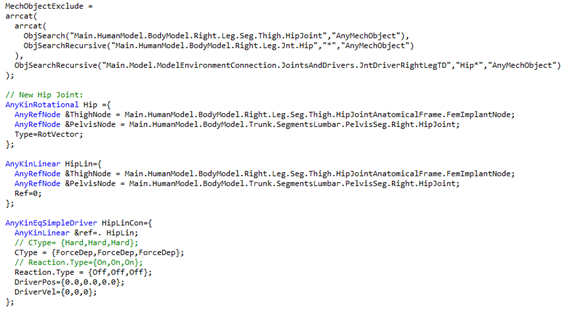
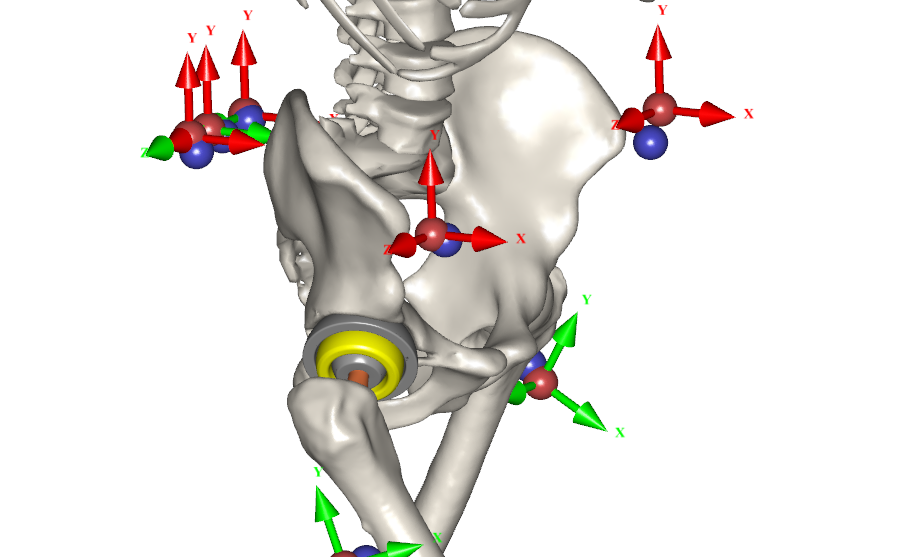
the model I want to make = pelvis implant <-> mobile implant <-> femur implant
so, there need one more joint(for insert mobile implant). and behavior of mobile joint is all DOF unlocked, the motion is determined by the contact condition.
I was make Sag for mobile implant, and made two joint that connect femur implant-mobile implant and mobile implant-pelvis implant. but it dosen’t work well
can you tell me where I have to fix and how I fix? Plz
It's a rather challenging model to do. AnyBody is an inverse dynamics modeling system and we generally solve for loads knowing kinematics. In your case the mobile bearing is completely unconstrained meaning that the system is kinematically indeterminate and this is why you see the error. In certain cases one could use an FDK solver to address questions like yours, but it might be very difficult.
Do you really need the mobile bearing? What is your question of interest? If you are interested in the loads - you may fix and assume it not moving, having enough friction. If not - then try the next steps.
For kinematic analyses (for example, MarkerTracking is a kinematic analysis) fix the bearing since the overall movement of the patient is not changing. You can only find movement of the bearing while performing an inverse dynamics using FDK.
When you perform inverse dynamics you need to create a 6 dof constraint between, say, pelvis+cup and the bearing, where you set degrees of freedom to be force-dependent (and switch on the FDK solver in settings). Same for the head/bearing. You would also need to define all surface contacts elements and provide contact parameters. You will need some artificial stiffness on the FDK joints to prevent from components 'flying away' from each other.
Try introducing FDK degrees of freedom 1 by 1 to gradually increase the complexity. And try to simplify your model as much as possible.
But if at all possible - I would consider not to model the mobile bearing.