Hi everyone
I'm trying to figured out the mechansim about force transmission between exoskeleton and human using provided SitToStand example.
There are some questions about CreateAnyGeneralForce6DOF
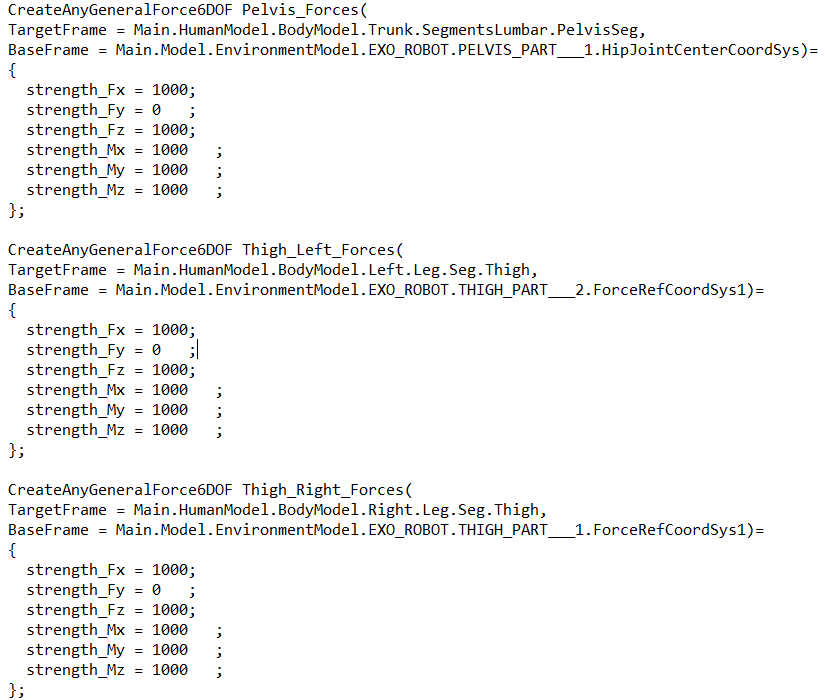
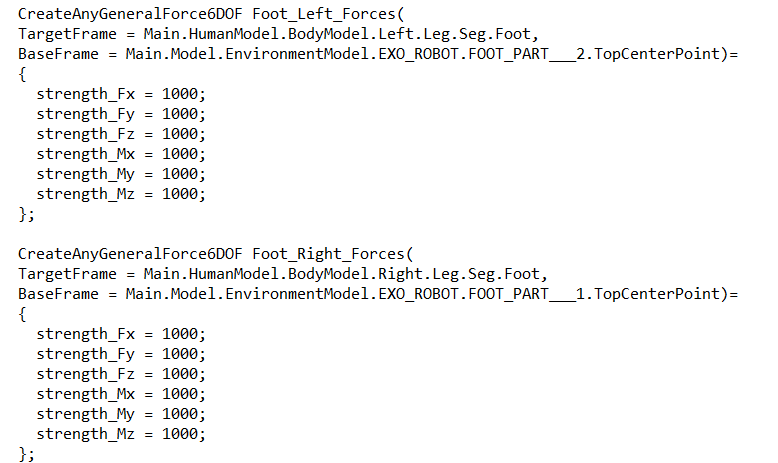
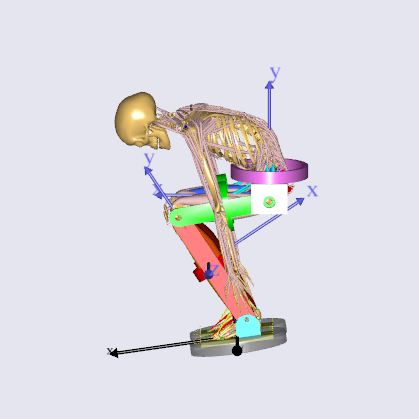
I noticed that exo was kineticly connected to human by using CreateAnyGeneralForce6DOF,. But some six dimensional strengths were set different in different connected position, as showing in the below figure.
Can you expain the reason for different strength setting?
And what's difference between using CreateAnyGeneralForce6DOF and conditional contace element?
Thanks
If there is a direction with zero force, there will be no force in that direction this likely made to replicate that there is supposed to be skin motion in that direction, so it can be used to avoid the contact to apply a force that would create "skin friction". The general force setup treats each force direct independently there are no link between them, this is not the case with the conditional muscles setup.
The conditional contact muscles can be used to create unilateral contact and to link normal force with frictional force... e.g. you can allow it to have a frictional force but only to the extend the normal force allow this. This type of behavior can not be made with the general muscles directly. Additionally the contact muscles can be active or inactive or not dependent on kinematics... useful for e.g. GRF prediction but also possibly also useful if you have shifting boundary conditions in an exo.