Hi Babaozhou,
I will try to explain the code you have listed.
This code
AnyKinEqSimpleDriver Exo_Thigh_ConnectionR =
{
AnyKinLinear lin =
{
....
};
AnyKinRotational rot =
{
...
Type = RotAxesAngles;
};
Reaction.Type = {OFF,OFF, OFF, OFF, OFF, OFF};
CType ={Hard,Hard,Hard,Hard,Hard,Hard};
DriverPos ={-0.08,0,0.05,0,0,0};
DriverVel ={0,0,0,0,0,0};
};
Will create six kinematic constraints using the linear and rotational measure. In the Linear and rotational measure you need to supply references to the two objects you would like to lock. So. Thigh and exo part. Note that this code will driver the linear postion to {-0.08,0,0.05} and rotations to {0,0,0} so it is important that the reference systems has same orientation (or you will need to apply non-zero rotations)
This code will create a driver on the exo knee joint and drive it to start in value taken from the mannequin.any file and it will have a constant velocity.
AnyKinEqSimpleDriver exo_knee_joint =
{
AnyRevoluteJoint& jnt = Main.Model.RightExo.Mates.Hinge;
DriverPos = {.JntPos.Right.KneeFlexion};
DriverVel = {.JntVel.Right.KneeFlexion};
Reaction.Type = {Off};
};
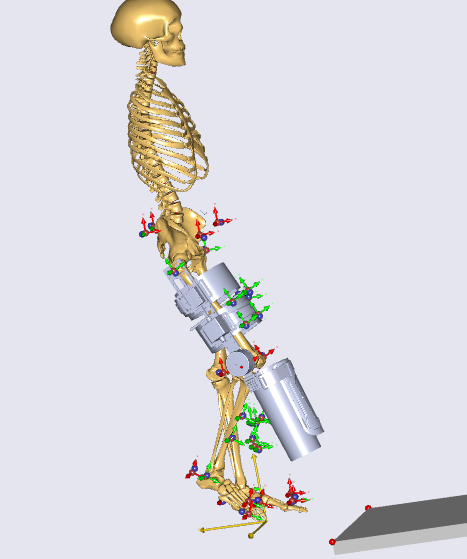
This driven is meaning full as part of the process to get the model running but eventually you would like this driver not to be present in the model and drive the eco knee angle either by markers or by a connection to the to shank (thigh)
Please see this wiki page relating to this topic (you might have already seen it) https://github.com/AnyBody/support/wiki/Connecting-an-exo-skeleton-to-a-human-model
Best regards
Søren