Hi Søren,
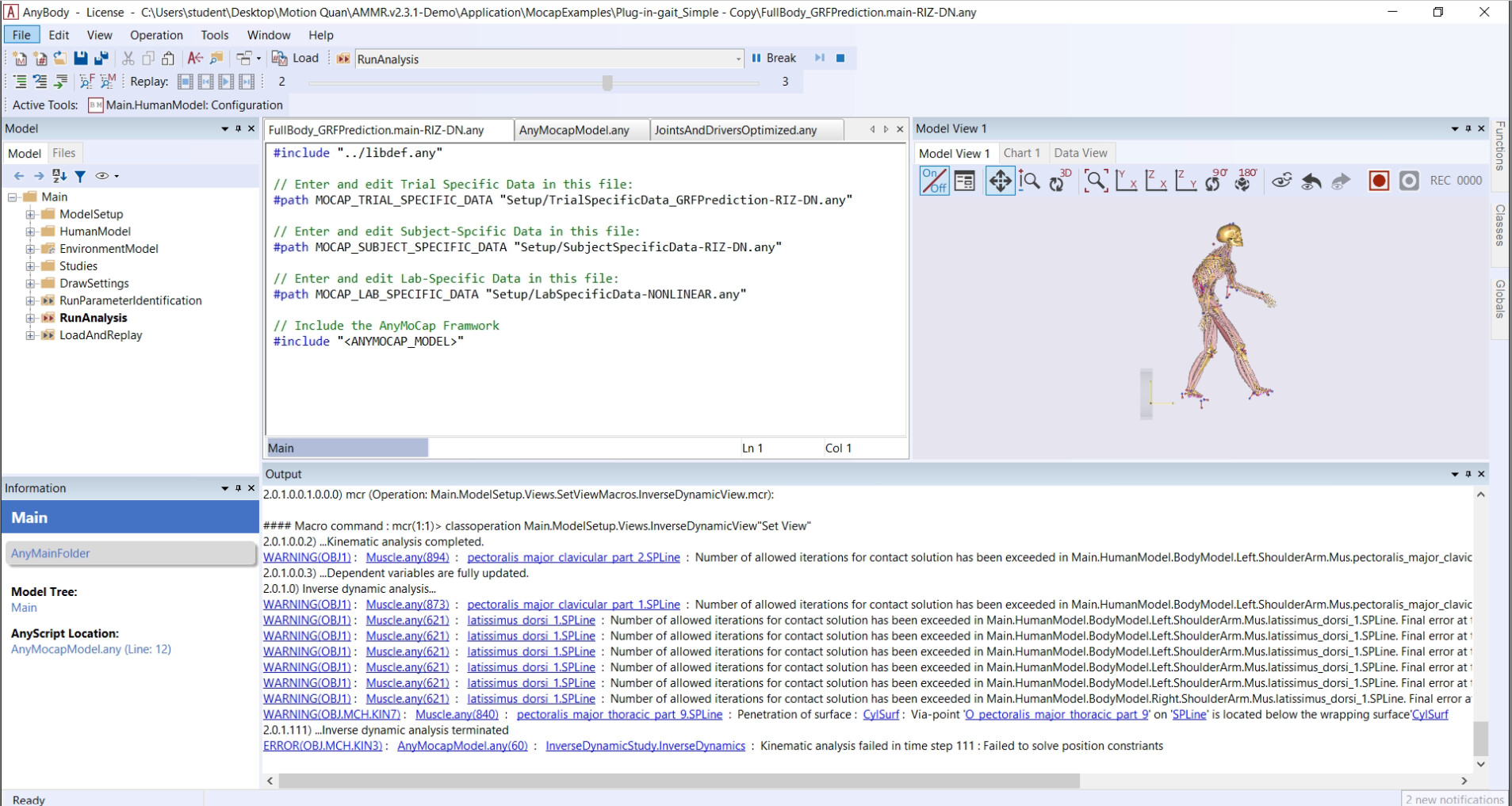
In this regard, I have a problem. I do not understand that why my model has a problem in Inverse dynamic, while it does not have any problems in inverse kinematics. As you mentioned, when the kinematic analysis has finished successfully the kinematics of the inverse dynamics is supposed to work without problems, but in my model, many errors occurred. Could you please look at the below and give me your opinion about this error? How can I overcome this problem?
Thanks in advance
0) Operation Sequence: (Operation: Main.RunAnalysis):
0.0) Operation Sequence: (Operation: Main.RunAnalysis.LoadParameters):
0.0.0) Operation Sequence: (Operation: Main.RunAnalysis.LoadParameters.SubOperations):
0.0.0.0) Dummy operation: (Operation: Main.RunAnalysis.LoadParameters.SubOperations.dummy):
0.1.0) Load_parameters (Operation: Main.ModelSetup.Macros.Load_parameters):
Macro command : Load_parameters(1:10)> classoperation Main "Load Values" --file="C:\Users\user2\Documents\AnyBody.7.3.x\rezaian\Application\MocapExamples\Plug-in-gait_Simple\Output/FullBody_st30 0 45.anyset"
Loading and overriding values from : 'C' ...
...Values updated
Macro command : Load_parameters(10:10)> classoperation Main "Update Values"
Updating expressions...
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Segments.BuckleSeg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.Seg: Non-orthogonal axes were adjusted.
WARNING(OBJ.MCH.KIN7) : Mus.any(1254) : Semitendinosus1.SPLine : Penetration of surface : cyl : Via-point 'SemitendinosusViaNode1' on 'SPLine' is located below the wrapping surface'cyl
WARNING(OBJ.MCH.KIN7) : Mus.any(1294) : Semimembranosus2.SPLine : Penetration of surface : cyl : Via-point 'Semimembranosus2Node' on 'SPLine' is located below the wrapping surface'cyl
WARNING(OBJ.MCH.KIN7) : Mus.any(1306) : Semimembranosus3.SPLine : Penetration of surface : cyl : Via-point 'Semimembranosus3Node' on 'SPLine' is located below the wrapping surface'cyl
WARNING(OBJ.MCH.KIN7) : Mus.any(1254) : Semitendinosus1.SPLine : Penetration of surface : cyl : Via-point 'SemitendinosusViaNode1' on 'SPLine' is located below the wrapping surface'cyl
WARNING(OBJ.MCH.KIN7) : Mus.any(1277) : Semimembranosus1.SPLine : Penetration of surface : cyl : Via-point 'Semimembranosus1Node' on 'SPLine' is located below the wrapping surface'cyl
WARNING(OBJ.MCH.KIN7) : Mus.any(1294) : Semimembranosus2.SPLine : Penetration of surface : cyl : Via-point 'Semimembranosus2Node' on 'SPLine' is located below the wrapping surface'cyl
WARNING(OBJ.MCH.KIN7) : Mus.any(1306) : Semimembranosus3.SPLine : Penetration of surface : cyl : Via-point 'Semimembranosus3Node' on 'SPLine' is located below the wrapping surface'cyl
...Finished updating expressions
1.0) Operation Sequence: (Operation: Main.RunAnalysis.MarkerTracking):
1.0.0) Operation Sequence: (Operation: Main.RunAnalysis.MarkerTracking.SubOperations):
1.0.0.0) Dummy operation: (Operation: Main.RunAnalysis.MarkerTracking.SubOperations.dummy):
1.0.1.0) Kinematics (Operation: Main.Studies.MarkerTracking.Kinematics):
1.0.1.0.0) PreOperation (Operation: Main.Studies.MarkerTracking.Kinematics.PreOperation):
1.0.1.0.0.0) InitialConditions (Operation: Main.Studies.MarkerTracking.InitialConditions):
1.0.1.0.0.0) ...Design variables have been updated.
1.0.1.0.0.1) ...Load-time positions have been re-established.
1.0.1.0.0.1.0) PreOperation (Operation: Main.Studies.MarkerTracking.InitialConditions.PreOperation):
1.0.1.0.0.1.0.0) Operation Sequence: (Operation: Main.ModelSetup.Views.SetViewMacros.KinematicView):
1.0.1.0.0.1.0.0.0) mcr (Operation: Main.ModelSetup.Views.SetViewMacros.KinematicView.mcr):
Macro command : mcr(1:1)> classoperation Main.ModelSetup.Views.KinematicView"Set View"
1.0.1.0.0.2) ...Kinematic analysis completed.
1.0.1.0.0.3) ...Dependent variables are fully updated.
1.0.1.0) Kinematic analysis...
1.0.1.161) ...Kinematic analysis completed
2.0) Operation Sequence: (Operation: Main.RunAnalysis.InverseDynamics):
2.0.0) Operation Sequence: (Operation: Main.RunAnalysis.InverseDynamics.SubOperations):
2.0.0.0) Dummy operation: (Operation: Main.RunAnalysis.InverseDynamics.SubOperations.dummy):
2.0.1.0) InverseDynamics (Operation: Main.Studies.InverseDynamicStudy.InverseDynamics):
2.0.1.0.0) PreOperation (Operation: Main.Studies.InverseDynamicStudy.InverseDynamics.PreOperation):
2.0.1.0.0.0) InitialConditions (Operation: Main.Studies.InverseDynamicStudy.InitialConditions):
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Segments.BuckleSeg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.Seg: Non-orthogonal axes were adjusted.
WARNING for Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.Seg: Non-orthogonal axes were adjusted.
2.0.1.0.0.0) ...Design variables have been updated.
2.0.1.0.0.1) ...Load-time positions have been re-established.
2.0.1.0.0.1.0) PreOperation (Operation: Main.Studies.InverseDynamicStudy.InitialConditions.PreOperation):
2.0.1.0.0.1.0.0) Operation Sequence: (Operation: Main.ModelSetup.Views.SetViewMacros.InverseDynamicView):
2.0.1.0.0.1.0.0.0) mcr (Operation: Main.ModelSetup.Views.SetViewMacros.InverseDynamicView.mcr):
Macro command : mcr(1:1)> classoperation Main.ModelSetup.Views.InverseDynamicView"Set View"
Constraint violations for study 'Main.Studies.InverseDynamicStudy' :
Constraint #44 is above tolerance 1e-05, error = 0.000041, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints'.
Constraint #45 is above tolerance 1e-05, error = 0.000020, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints'.
Constraint #46 is above tolerance 1e-05, error = 0.000033, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints'.
Constraint #49 is above tolerance 1e-05, error = 0.002818, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.Slider1Jnt.Constraints'.
Constraint #50 is above tolerance 1e-05, error = 0.001004, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.Slider1Jnt.Constraints'.
Constraint #54 is above tolerance 1e-05, error = 0.010442, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.LinDrv'.
Constraint #55 is above tolerance 1e-05, error = 0.005140, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.Slider1Jnt.Constraints'.
Constraint #56 is above tolerance 1e-05, error = 0.000421, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.Slider1Jnt.Constraints'.
Constraint #60 is above tolerance 1e-05, error = 0.019593, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.LinDrv'.
Constraint #61 is above tolerance 1e-05, error = 0.000099, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.Slider1Jnt.Constraints'.
Constraint #62 is above tolerance 1e-05, error = 0.000371, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.Slider1Jnt.Constraints'.
Constraint #66 is above tolerance 1e-05, error = 0.001191, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.LinDrv'.
Constraint #67 is above tolerance 1e-05, error = 0.000748, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.Slider1Jnt.Constraints'.
Constraint #68 is above tolerance 1e-05, error = 0.000252, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.Slider1Jnt.Constraints'.
Constraint #72 is above tolerance 1e-05, error = 0.000011, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.LinDrv'.
Constraint #73 is above tolerance 1e-05, error = 0.000367, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.Slider1Jnt.Constraints'.
Constraint #74 is above tolerance 1e-05, error = 0.000908, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.Slider1Jnt.Constraints'.
Constraint #82 is above tolerance 1e-05, error = 0.009683, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.LinDrvRight'.
Constraint #83 is above tolerance 1e-05, error = 0.001004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.LinDrvLeft'.
Constraint #84 is above tolerance 1e-05, error = 0.005210, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.LinDrvMid'.
Constraint #85 is above tolerance 1e-05, error = 0.003057, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #86 is above tolerance 1e-05, error = 0.009114, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #90 is above tolerance 1e-05, error = 0.008125, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.drv'.
Constraint #94 is above tolerance 1e-05, error = 0.009883, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.LinDrvRight'.
Constraint #95 is above tolerance 1e-05, error = 0.002315, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.LinDrvLeft'.
Constraint #96 is above tolerance 1e-05, error = 0.002971, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.LinDrvMid'.
Constraint #97 is above tolerance 1e-05, error = 0.003539, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #98 is above tolerance 1e-05, error = 0.005569, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #102 is above tolerance 1e-05, error = 0.009569, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.drv'.
Constraint #106 is above tolerance 1e-05, error = 0.002918, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.LinDrvRight'.
Constraint #107 is above tolerance 1e-05, error = 0.001441, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.LinDrvLeft'.
Constraint #108 is above tolerance 1e-05, error = 0.001826, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.LinDrvMid'.
Constraint #109 is above tolerance 1e-05, error = 0.000128, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #110 is above tolerance 1e-05, error = 0.002804, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #114 is above tolerance 1e-05, error = 0.002099, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.drv'.
Constraint #118 is above tolerance 1e-05, error = 0.000011, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.LinDrvRight'.
Constraint #119 is above tolerance 1e-05, error = 0.000020, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.LinDrvLeft'.
Constraint #120 is above tolerance 1e-05, error = 0.000032, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.LinDrvMid'.
Constraint #121 is above tolerance 1e-05, error = 0.000094, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #122 is above tolerance 1e-05, error = 0.000183, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #126 is above tolerance 1e-05, error = 0.000135, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.drv'.
Constraint #130 is above tolerance 1e-05, error = 0.000012, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.LinDrvRight'.
Constraint #134 is above tolerance 1e-05, error = 0.000015, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.VirtuelSegDiscJnt.Constraints'.
Constraint #139 is above tolerance 1e-05, error = 0.001653, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.LinTopDrv'.
Constraint #140 is above tolerance 1e-05, error = 0.001230, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.LinTopDrv'.
Constraint #141 is above tolerance 1e-05, error = 0.002004, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.LinTopDrv'.
Constraint #142 is above tolerance 1e-05, error = 0.010205, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.RotTopDrv'.
Constraint #143 is above tolerance 1e-05, error = 0.000392, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.LinBottomDrv'.
Constraint #144 is above tolerance 1e-05, error = 0.000378, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.LinBottomDrv'.
Constraint #150 is above tolerance 1e-05, error = 0.000095, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentRight.Drv2'.
Constraint #263 is above tolerance 1e-05, error = 0.000014, constr. #4 in 'Main.HumanModel.BodyModel.Left.ShoulderArm.Jnt.WristJointFlexion.Constraints'.
Constraint #371 is above tolerance 1e-05, error = 0.000018, constr. #1 in 'Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverLeftArm'.
Constraint #372 is above tolerance 1e-05, error = 0.000011, constr. #2 in 'Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverLeftArm'.
Constraint #376 is above tolerance 1e-05, error = 0.000041, constr. #6 in 'Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverLeftArm'.
Constraint #378 is above tolerance 1e-05, error = 0.000022, constr. #8 in 'Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverLeftArm'.
Constraint #383 is above tolerance 1e-05, error = 0.000011, constr. #0 in 'Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverRightArm'.
Constraint #389 is above tolerance 1e-05, error = 0.000021, constr. #6 in 'Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverRightArm'.
Constraint #393 is above tolerance 1e-05, error = 0.000021, constr. #10 in 'Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverRightArm'.
Constraint #405 is above tolerance 1e-05, error = 0.000037, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsThorax.SkullSeg'.
Constraint #407 is above tolerance 1e-05, error = 0.000021, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C1Seg'.
Constraint #408 is above tolerance 1e-05, error = 0.000017, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C2Seg'.
Constraint #409 is above tolerance 1e-05, error = 0.000010, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C3Seg'.
Constraint #414 is above tolerance 1e-05, error = 0.004149, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Segments.BuckleSeg'.
Constraint #415 is above tolerance 1e-05, error = 0.004149, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.Seg'.
Constraint #416 is above tolerance 1e-05, error = 0.004149, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.Seg'.
Constraint #417 is above tolerance 1e-05, error = 0.004149, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.Seg'.
Constraint #418 is above tolerance 1e-05, error = 0.004149, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.Seg'.
Constraint #419 is above tolerance 1e-05, error = 0.004149, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.Seg'.
Constraint #420 is above tolerance 1e-05, error = 0.000095, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentRight.Seg'.
Constraint #422 is above tolerance 1e-05, error = 0.045528, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.DiscSeg'.
Constraint #423 is above tolerance 1e-05, error = 0.045528, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.VirtuelSeg'.
Constraint #424 is above tolerance 1e-05, error = 0.082097, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.DiscSeg'.
Constraint #425 is above tolerance 1e-05, error = 0.082097, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.VirtuelSeg'.
Constraint #426 is above tolerance 1e-05, error = 0.018930, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.DiscSeg'.
Constraint #427 is above tolerance 1e-05, error = 0.018930, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.VirtuelSeg'.
Constraint #428 is above tolerance 1e-05, error = 0.000360, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.DiscSeg'.
Constraint #429 is above tolerance 1e-05, error = 0.000360, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.VirtuelSeg'.
Constraint #430 is above tolerance 1e-05, error = 0.000020, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.DiscSeg'.
Constraint #431 is above tolerance 1e-05, error = 0.000020, segment constr. 'Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.VirtuelSeg'.
Constraint #432 is above tolerance 1e-05, error = 0.000015, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Scapula'.
Constraint #433 is above tolerance 1e-05, error = 0.000013, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Clavicula'.
Constraint #434 is above tolerance 1e-05, error = 0.000017, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Humerus'.
Constraint #435 is above tolerance 1e-05, error = 0.000038, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Radius'.
Constraint #436 is above tolerance 1e-05, error = 0.000019, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Ulna'.
Constraint #437 is above tolerance 1e-05, error = 0.000055, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Mus.DeltoidWrappingLateral.WrappingSegment'.
Constraint #438 is above tolerance 1e-05, error = 0.000055, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Mus.DeltoidWrappingAnterior.WrappingSegment'.
Constraint #439 is above tolerance 1e-05, error = 0.000038, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.WristJointSeg'.
Constraint #440 is above tolerance 1e-05, error = 0.000048, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Hand'.
Constraint #441 is above tolerance 1e-05, error = 0.000048, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Glove'.
Constraint #443 is above tolerance 1e-05, error = 0.000010, segment constr. 'Main.HumanModel.BodyModel.Right.Leg.Seg.Foot'.
Constraint #446 is above tolerance 1e-05, error = 0.000029, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Scapula'.
Constraint #447 is above tolerance 1e-05, error = 0.000021, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Clavicula'.
Constraint #448 is above tolerance 1e-05, error = 0.000026, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Humerus'.
Constraint #449 is above tolerance 1e-05, error = 0.000017, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Radius'.
Constraint #450 is above tolerance 1e-05, error = 0.000019, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Ulna'.
Constraint #451 is above tolerance 1e-05, error = 0.000068, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Mus.DeltoidWrappingLateral.WrappingSegment'.
Constraint #452 is above tolerance 1e-05, error = 0.000068, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Mus.DeltoidWrappingAnterior.WrappingSegment'.
Constraint #453 is above tolerance 1e-05, error = 0.000032, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.WristJointSeg'.
Constraint #454 is above tolerance 1e-05, error = 0.000033, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Hand'.
Constraint #455 is above tolerance 1e-05, error = 0.000033, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Glove'.
ERROR(OBJ.MCH.KIN3) : AnyMocapModel.any(60) : InverseDynamicStudy.InitialConditions : Kinematic analysis failed in time step 0 : Failed to solve position constriants