Hello everyone!
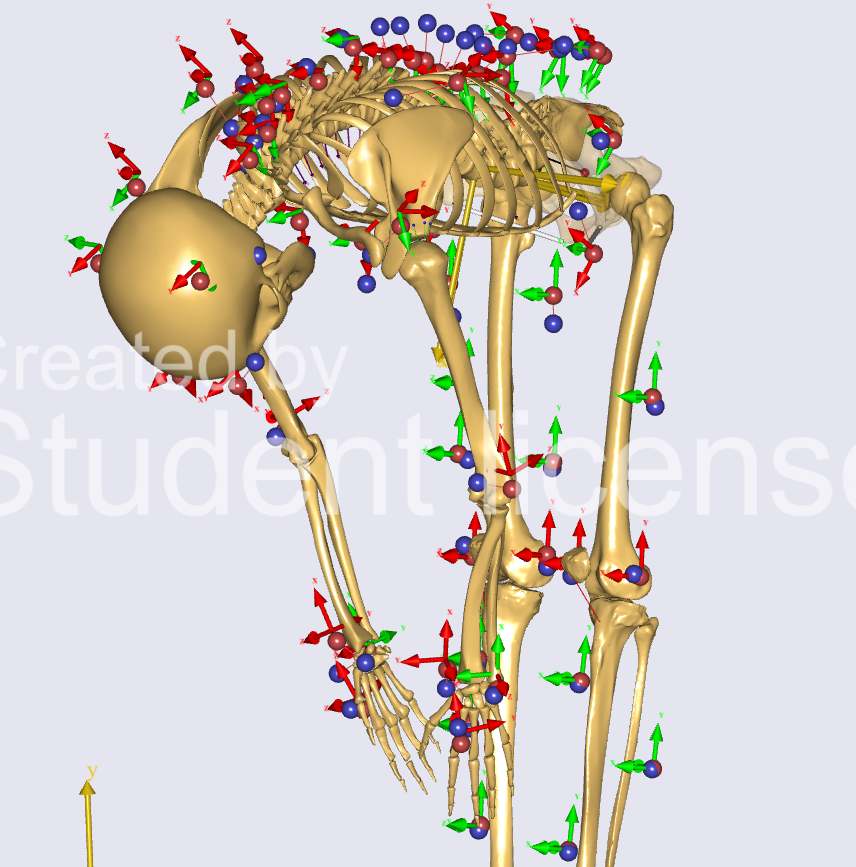
We've been simulating on AnyBody 8.1 beta version the task of forward flexion of patients that suffer from Lumbar Spinal Stenosis using the full body 'Plug-in-gait_FlexibleThorax' model. For the scaling and parameter optimization of each patient we've been using the AnySet file obtained during a static pose of the patient, separate from the actual motion of forward flexion.
For some patients, we haven't encountered any problems and everything runs smoothly.
But for the majority of the patients, we have encountered problems starting from 'Marker Tracking' analysis.
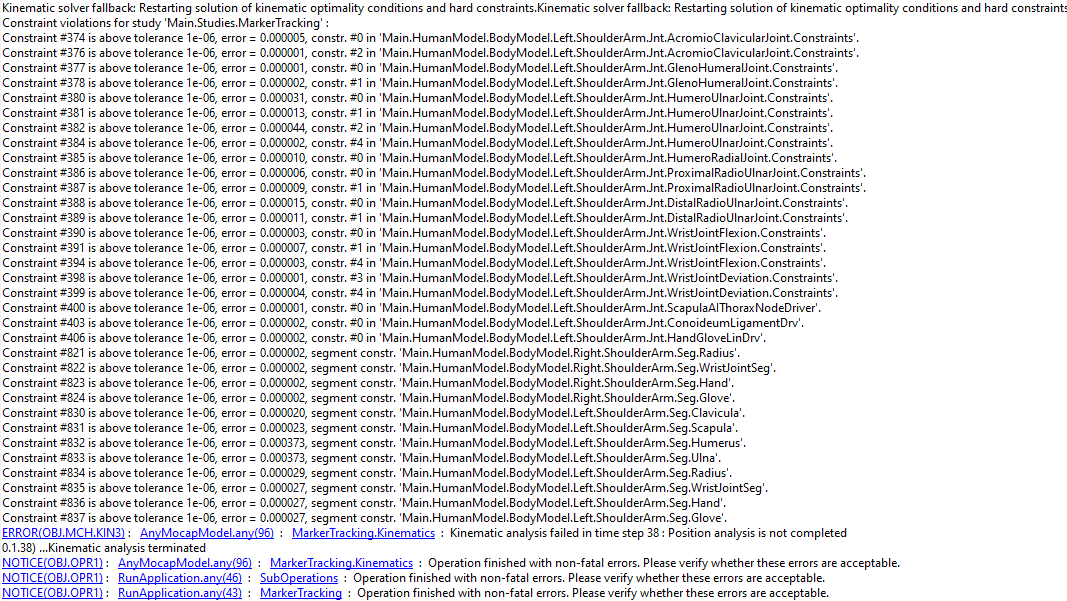
As you can see in the attachment, the simulation stops due to the fact that there are constraints over tolerance, especially the acromio clavicular joint, and this usually happens when the patient is in the maximum flexion position.
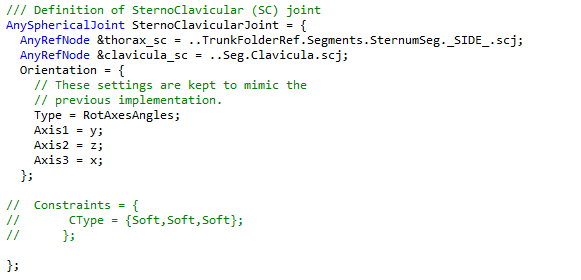
We've tried setting the spherical joint constraint to soft, which resolved the issue temporarily, but the same problem started re-appering in other joints.
In some situations, the simulation stops and simply gives out:
'Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.
Constraint violations for study 'Main.Studies.MarkerTracking' :
ERROR(OBJ.MCH.KIN3) : AnyMocapModel.any(96) : MarkerTracking.Kinematics : Kinematic analysis failed in time step 24 : Position analysis is not completed'
This also happens during the descending phase of the forward flexion
In other situations, before stopping the simulation, it gives out the following warning: 'Close to singular position: orientation close to Gimbal lock'.

We suppose all these errors are linked to the same original problem.
Any help with this would be greatly appreciated.
Thank you very much!