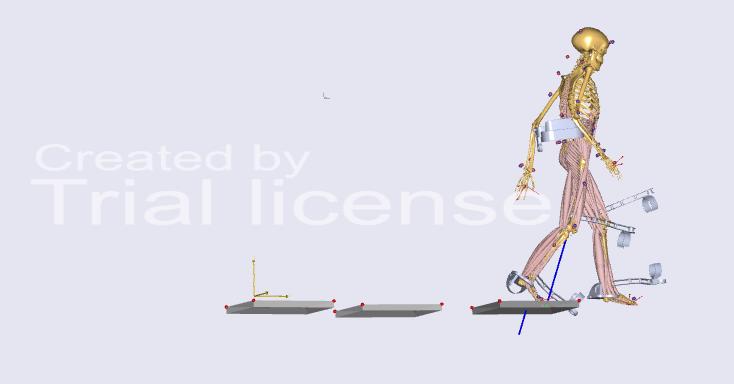
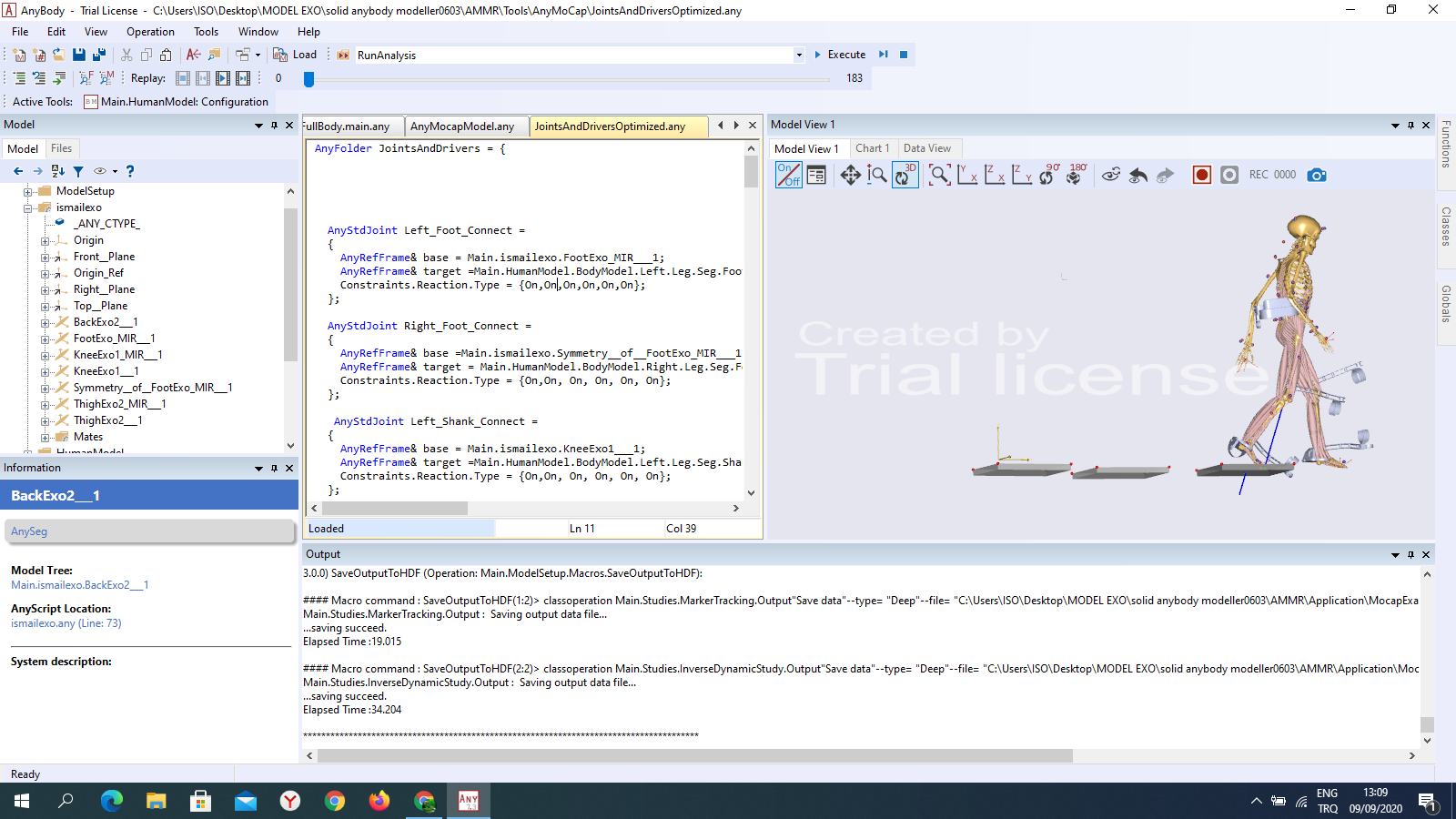
Hi My friends.I am studying exoskeleton model with Movap gait model.I exported the exoskleton model and I have added AnyStdJoint.But I have a problem with exoskeleton parts.I added pictures related to this problem. I am waiting your interesting ideas. Thanks for your interests...
Best Regards
İsmail,
AnyFolder JointsAndDrivers = {
AnyStdJoint Left_Foot_Connect =
{
AnyRefFrame& base = Main.ismailexo.FootExo_MIR___1;
AnyRefFrame& target =Main.HumanModel.BodyModel.Left.Leg.Seg.Foot ;
Constraints.Reaction.Type = {On,On,On,On,On,On};
};
AnyStdJoint Right_Foot_Connect =
{
AnyRefFrame& base =Main.ismailexo.Symmetry__of__FootExo_MIR___1;
AnyRefFrame& target = Main.HumanModel.BodyModel.Right.Leg.Seg.Foot;
Constraints.Reaction.Type = {On,On, On, On, On, On};
};
AnyStdJoint Left_Shank_Connect =
{
AnyRefFrame& base = Main.ismailexo.KneeExo1___1;
AnyRefFrame& target =Main.HumanModel.BodyModel.Left.Leg.Seg.Shank;
Constraints.Reaction.Type = {On,On, On, On, On, On};
};
AnyStdJoint Right_Shank_Connect =
{
AnyRefFrame& base=Main.ismailexo.KneeExo1_MIR___1 ;
AnyRefFrame& target = Main.HumanModel.BodyModel.Right.Leg.Seg.Shank;
Constraints.Reaction.Type = {On,On, On, On, On, On};
};
AnyStdJoint Left_Thigh_Connect =
{
AnyRefFrame& base=Main.ismailexo.ThighExo2_MIR___1 ;
AnyRefFrame& target = Main.HumanModel.BodyModel.Left.Leg.Seg.Thigh;
Constraints.Reaction.Type = {On,On, On, On, On, On};
};
AnyStdJoint Right_Thigh_Connect =
{
AnyRefFrame& base=Main.ismailexo.ThighExo2___1 ;
AnyRefFrame& target =Main.HumanModel.BodyModel.Right.Leg.Seg.Thigh ;
Constraints.Reaction.Type = {On,On, On, On, On, On};
};
AnyStdJoint Hip_Main_Connect =
{
AnyRefFrame& base=Main.ismailexo.BackExo2___1 ;
AnyRefFrame& target =Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.PelvisSeg ;
Constraints.Reaction.Type = {On,On, On, On, On, On};
};
AnyComponentDefinition obj = {
NameCast = "OptimizedJointDrivers";
};
AnyKinDriver JntDriverTrunkFull = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-rotvec-trunk-full.txt";
/// The default data if no joint angles files have been generated.
FileReader.Data0 = repmat(
1, FileReader.Length0,
arrcat({Main.HumanModel.Mannequin.Posture.PelvisPosX,
Main.HumanModel.Mannequin.Posture.PelvisPosY,
Main.HumanModel.Mannequin.Posture.PelvisPosZ,
Main.HumanModel.Mannequin.Posture.PelvisRotXpi/180,
Main.HumanModel.Mannequin.Posture.PelvisRotYpi/180,
Main.HumanModel.Mannequin.Posture.PelvisRotZ*pi/180
},repmat(nDim-6,0.0)
)
);
AnyKinMeasure& PelvisPosX = ...BodyModel.Interface.Trunk.PelvisPosX;
AnyKinMeasure& PelvisPosY = ...BodyModel.Interface.Trunk.PelvisPosY;
AnyKinMeasure& PelvisPosZ = ...BodyModel.Interface.Trunk.PelvisPosZ;
AnyKinMeasure& PelvisRotVec = ...BodyModel.Interface.Trunk.PelvisRotVec;
AnyKinMeasureOrg& SacrumPelvis = ...BodyModel.Interface.Trunk.Spine.SacrumPelvis;
AnyKinMeasureOrg& L5Sacrum =...BodyModel.Interface.Trunk.Spine.L5Sacrum;
AnyKinMeasureOrg& L4L5 =...BodyModel.Interface.Trunk.Spine.L4L5;
AnyKinMeasureOrg& L3L4 =...BodyModel.Interface.Trunk.Spine.L3L4;
AnyKinMeasureOrg& L2L3 =...BodyModel.Interface.Trunk.Spine.L2L3;
AnyKinMeasureOrg& L1L2 =...BodyModel.Interface.Trunk.Spine.L1L2;
AnyKinMeasureOrg& T12L1 =...BodyModel.Interface.Trunk.Spine.T12L1;
AnyKinMeasureOrg& T1C7 =...BodyModel.Interface.Trunk.Spine.T1C7;
AnyKinMeasureOrg& C7C6 =...BodyModel.Interface.Trunk.Spine.C7C6;
AnyKinMeasureOrg& C6C5 =...BodyModel.Interface.Trunk.Spine.C6C5;
AnyKinMeasureOrg& C5C4 =...BodyModel.Interface.Trunk.Spine.C5C4;
AnyKinMeasureOrg& C4C3 =...BodyModel.Interface.Trunk.Spine.C4C3;
AnyKinMeasureOrg& C3C2 =...BodyModel.Interface.Trunk.Spine.C3C2;
AnyKinMeasureOrg& C2C1 =...BodyModel.Interface.Trunk.Spine.C2C1;
AnyKinMeasureOrg& C1C0 =...BodyModel.Interface.Trunk.Spine.C1C0;
Reaction.Type = repmat(nDim, Off);
};
#if BM_LEG_LEFT & (BM_LEG_MODEL == LEG_MODEL_TLEM | BM_LEG_MODEL == LEG_MODEL_TLEM2)
AnyKinDriver JntDriverLeftLegTD = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX +MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-euler-left_leg_tlem.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& HipFlexion = ...BodyModel.Interface.Left.HipFlexion;
AnyKinMeasure& HipAbduction = ...BodyModel.Interface.Left.HipAbduction;
AnyKinMeasure& HipExternalRotation = ...BodyModel.Interface.Left.HipExternalRotation;
AnyKinMeasure& KneeFlexion = ...BodyModel.Interface.Left.KneeFlexion;
AnyKinMeasure& AnklePlantarFlexion = ...BodyModel.Interface.Left.AnklePlantarFlexion;
AnyKinMeasure& SubTalarEversion = ...BodyModel.Interface.Left.SubTalarEversion;
Reaction.Type = repmat(nDim, Off);
};
#endif
#if BM_LEG_RIGHT & (BM_LEG_MODEL == LEG_MODEL_TLEM | BM_LEG_MODEL == LEG_MODEL_TLEM2)
AnyKinDriver JntDriverRightLegTD = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-euler-right_leg_tlem.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& HipFlexion = ...BodyModel.Interface.Right.HipFlexion;
AnyKinMeasure& HipAbduction = ...BodyModel.Interface.Right.HipAbduction;
AnyKinMeasure& HipExternalRotation = ...BodyModel.Interface.Right.HipExternalRotation;
AnyKinMeasure& KneeFlexion = ...BodyModel.Interface.Right.KneeFlexion;
AnyKinMeasure& AnklePlantarFlexion = ...BodyModel.Interface.Right.AnklePlantarFlexion;
AnyKinMeasure& SubTalarEversion = ...BodyModel.Interface.Right.SubTalarEversion;
Reaction.Type = repmat(nDim, Off);
};
#endif
#if BM_LEG_LEFT & BM_LEG_MODEL == LEG_MODEL_LEG
AnyKinDriver JntDriverLeftLeg = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-euler-left_leg.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& HipFlexion = ...BodyModel.Interface.Left.HipFlexion;
AnyKinMeasure& HipAbduction = ...BodyModel.Interface.Left.HipAbduction;
AnyKinMeasure& HipExternalRotation = ...BodyModel.Interface.Left.HipExternalRotation;
AnyKinMeasure& KneeFlexion = ...BodyModel.Interface.Left.KneeFlexion;
AnyKinMeasure& AnklePlantarFlexion = ...BodyModel.Interface.Left.AnklePlantarFlexion;
AnyKinMeasure& AnkleEversion = ...BodyModel.Interface.Left.AnkleEversion;
Reaction.Type = repmat(nDim, Off);
};
#endif
#if BM_LEG_RIGHT & BM_LEG_MODEL == LEG_MODEL_LEG
AnyKinDriver JntDriverRightLeg = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-euler-right_leg.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& HipFlexion = ...BodyModel.Interface.Right.HipFlexion;
AnyKinMeasure& HipAbduction = ...BodyModel.Interface.Right.HipAbduction;
AnyKinMeasure& HipExternalRotation = ...BodyModel.Interface.Right.HipExternalRotation;
AnyKinMeasure& KneeFlexion = ...BodyModel.Interface.Right.KneeFlexion;
AnyKinMeasure& AnklePlantarFlexion = ...BodyModel.Interface.Right.AnklePlantarFlexion;
AnyKinMeasure& AnkleEversion = ...BodyModel.Interface.Right.AnkleEversion;
Reaction.Type = repmat(nDim, Off);
};
#endif
#if BM_ARM_LEFT == ON
AnyKinDriver JntDriverLeftArm = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-rotvec-left_arm_shoulder.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& ThoraxClavicula=...BodyModel.Interface.Left.RotVectorMeasures.ThoraxClavicula;
AnyKinMeasure& ClaviculaScapula=...BodyModel.Interface.Left.RotVectorMeasures.ClaviculaScapula;
AnyKinMeasure& ScapulaHumerus=...BodyModel.Interface.Left.RotVectorMeasures.ScapulaHumerus;
AnyKinMeasure& HumerusUlna=...BodyModel.Interface.Left.RotVectorMeasures.HumerusUlna;
AnyKinMeasure& UlnaRadius=...BodyModel.Interface.Left.RotVectorMeasures.UlnaRadius;
AnyKinMeasure& RadiusWrist=...BodyModel.Interface.Left.RotVectorMeasures.RadiusWrist;
AnyKinMeasure& WristHand=...BodyModel.Interface.Left.RotVectorMeasures.WristHand;
Reaction.Type = repmat(nDim, Off);
};
#if BM_ARM_DETAILED_HAND
AnyKinDriver JntDriverLeftDetailedHand = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-euler-left_detailed_hand.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& CMC1Flexion = ...BodyModel.Interface.Left.CMCFlexion;
AnyKinMeasure& CMC1Abduction = ...BodyModel.Interface.Left.CMCAbduction;
AnyKinMeasure& MCP1Flexion = ...BodyModel.Interface.Left.MCPFlexion;
AnyKinMeasure& MCP1Abduction = ...BodyModel.Interface.Left.MCPAbduction;
AnyKinMeasure& DIP1 = ...BodyModel.Interface.Left.DIP;
AnyKinMeasure& MCP2 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger2.Jnt.MCP;
AnyKinMeasure& PIP2 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger2.Jnt.PIP;
AnyKinMeasure& DIP2 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger2.Jnt.DIP;
AnyKinMeasure& MCP3 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger3.Jnt.MCP;
AnyKinMeasure& PIP3 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger3.Jnt.PIP;
AnyKinMeasure& DIP3 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger3.Jnt.DIP;
AnyKinMeasure& MCP4 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger4.Jnt.MCP;
AnyKinMeasure& PIP4 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger4.Jnt.PIP;
AnyKinMeasure& DIP4 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger4.Jnt.DIP;
AnyKinMeasure& MCP5 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger5.Jnt.MCP;
AnyKinMeasure& PIP5 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger5.Jnt.PIP;
AnyKinMeasure& DIP5 = ...BodyModel.Left.ShoulderArm.Seg.Hand.Finger5.Jnt.DIP;
Reaction.Type = repmat(nDim, Off);
};
#endif
#endif
#if BM_ARM_RIGHT == ON
AnyKinDriver JntDriverRightArm = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-rotvec-right_arm_shoulder.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& ThoraxClavicula=...BodyModel.Interface.Right.RotVectorMeasures.ThoraxClavicula;
AnyKinMeasure& ClaviculaScapula=...BodyModel.Interface.Right.RotVectorMeasures.ClaviculaScapula;
AnyKinMeasure& ScapulaHumerus=...BodyModel.Interface.Right.RotVectorMeasures.ScapulaHumerus;
AnyKinMeasure& HumerusUlna=...BodyModel.Interface.Right.RotVectorMeasures.HumerusUlna;
AnyKinMeasure& UlnaRadius=...BodyModel.Interface.Right.RotVectorMeasures.UlnaRadius;
AnyKinMeasure& RadiusWrist=...BodyModel.Interface.Right.RotVectorMeasures.RadiusWrist;
AnyKinMeasure& WristHand=...BodyModel.Interface.Right.RotVectorMeasures.WristHand;
Reaction.Type = repmat(nDim, Off);
};
#if BM_ARM_DETAILED_HAND
AnyKinDriver JntDriverRightDetailedHand = {
#include "InterpolateJointAngleData.any"
FileReader.FileName = TEMP_PATH + "/" + MOCAP_TEST_FILENAME_PREFIX + MOCAP_OUTPUT_FILENAME_PREFIX + Main.ModelSetup.TrialSpecificData.TrialFileName + "-euler-right_detailed_hand.txt";
FileReader.Data0 = zeros(nDim, FileReader.Length0 );
AnyKinMeasure& CMC1Flexion = ...BodyModel.Interface.Right.CMCFlexion;
AnyKinMeasure& CMC1Abduction = ...BodyModel.Interface.Right.CMCAbduction;
AnyKinMeasure& MCP1Flexion = ...BodyModel.Interface.Right.MCPFlexion;
AnyKinMeasure& MCP1Abduction = ...BodyModel.Interface.Right.MCPAbduction;
AnyKinMeasure& DIP1 = ...BodyModel.Interface.Right.DIP;
AnyKinMeasure& MCP2 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger2.Jnt.MCP;
AnyKinMeasure& PIP2 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger2.Jnt.PIP;
AnyKinMeasure& DIP2 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger2.Jnt.DIP;
AnyKinMeasure& MCP3 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger3.Jnt.MCP;
AnyKinMeasure& PIP3 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger3.Jnt.PIP;
AnyKinMeasure& DIP3 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger3.Jnt.DIP;
AnyKinMeasure& MCP4 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger4.Jnt.MCP;
AnyKinMeasure& PIP4 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger4.Jnt.PIP;
AnyKinMeasure& DIP4 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger4.Jnt.DIP;
AnyKinMeasure& MCP5 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger5.Jnt.MCP;
AnyKinMeasure& PIP5 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger5.Jnt.PIP;
AnyKinMeasure& DIP5 = ...BodyModel.Right.ShoulderArm.Seg.Hand.Finger5.Jnt.DIP;
Reaction.Type = repmat(nDim, Off);
};
#endif
#endif
};