The external device is connected to the seg of the body by creating a node on each of the two nodes and then connecting with the joint. However, the coordinate system of the two nodes is not consistent, which leads to the rotation of the device by an Angle during the inverse kinematics calculation. How to unify the coordinate system of the two nodes?
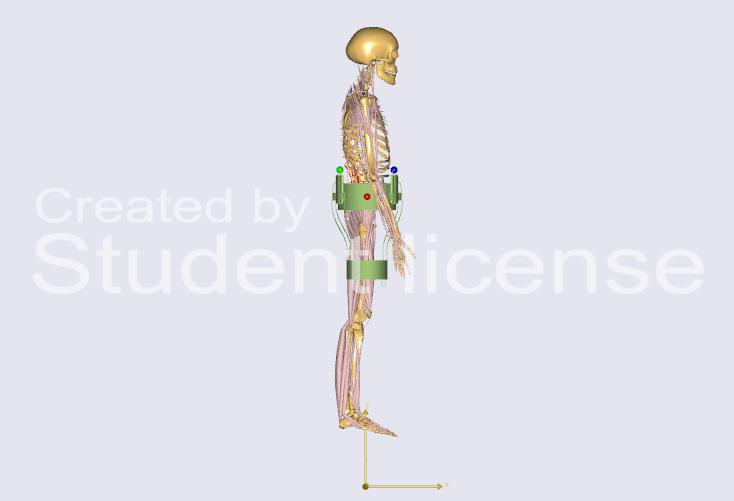
Before calculated
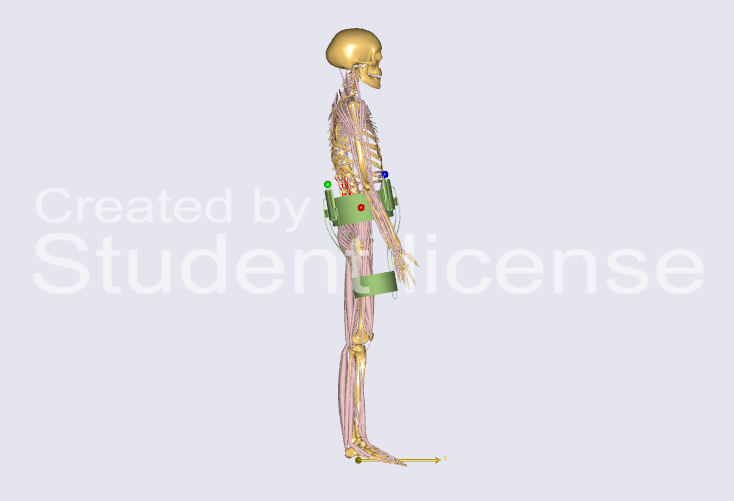
After the calculation
AnySeg BeltSeg={
r0 = Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.PelvisSeg.r0+{0.07,-0.055,0};
Mass=4;
Jii={0.101,0.101,0.101};
AnyRefNode Right = {sRel={0,0.055,-0.15820};
AnyDrawRefFrame dd={};
AnyDrawNode StrapBack2 =
{
RGB = {1, 0, 0};
ScaleXYZ = {0.005, 0.005, 0.005}3;
};
};
AnyRefNode surfnode = {
ARel=RotMat(90pi/180,y);
AnyDrawRefFrame dd={};
AnyDrawSurf srf={
FileName="Belt-1.STL";
ScaleXYZ={1,1,1}*0.001;
RGB={0.8,1,0.6};
};
};
};
Main.Model.BodyModel.Trunk.SegmentsLumbar.PelvisSeg = {
AnyRefNode AddNodeR = {
sRel = {0.07, 0, -0.15820};
AnyDrawRefFrame dd={};
AnyDrawNode AddNodeR =
{
RGB = {0, 1, 0};
ScaleXYZ = {0.005, 0.005, 0.005};
};
};
};
AnyStdJoint BeltDrv_R={
AnyRefFrame &Ref0=.BeltSeg.Right;
AnyRefFrame &Ref1= Main.Model.BodyModel.Trunk.SegmentsLumbar.PelvisSeg.AddNodeR;
Constraints.CType={Soft,Soft,Soft,Soft,Soft,Soft};
};