Dear AnyBody Community
I'm attempting to replicate a cadaver experiment within AnyBody software. The experiment involved scanning a cadaver's lower limbs (femur, tibia-fibula, and patella) in four different positions. We used these scans to interpolate and generate 28 frames of leg motion data. Subsequently, seven bone markers were applied, and the data was converted into a C3D file.
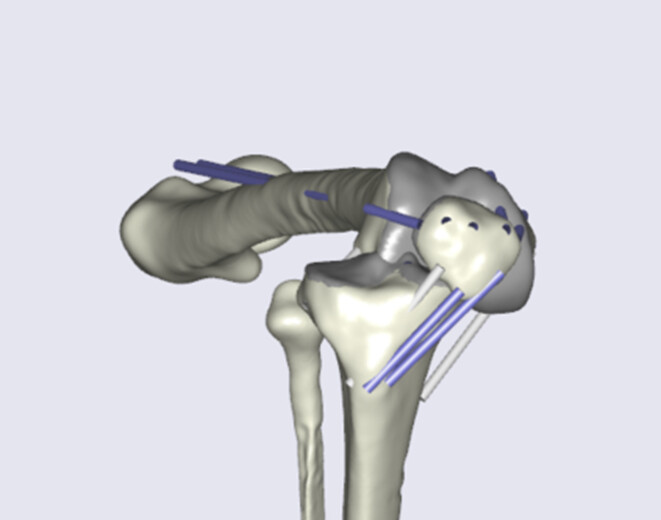
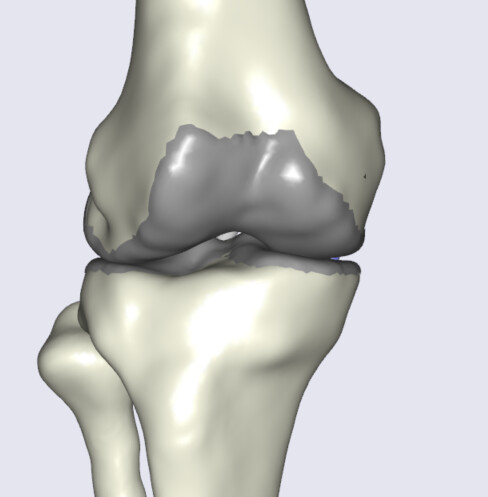
I've successfully created a model with revolute joints between the femur and tibia and between the femur and patella. However, I'm aiming to expand this to a 6-degree-of-freedom model for the femur-tibia joint. To achieve this, I incorporated the relevant ligaments and cartilage layers.
While the FDK tutorial and KneeSimulator example provided valuable insights, I'm uncertain about how to proceed further since:
- The experiment involved a cadaver with no active muscle contribution.
- The scans were obtained with the cadaver in a lying position, lacking data on ground reaction forces (GRF) or loads like the hip axial force mentioned in the examples.
Given these constraints, I would appreciate guidance on the best course of action:
- Should I introduce a minimal stabilizing force at the hip joint?
- Can the FDK simulation function solely with the ligament information and the C3D data?
Thank you for your time and assistance.
Best regards
Kate Duquesne