I added 4 contact elements around the lower limb exoskeleton and the Human. But I found that it can run inverse dynamic analysis only when StaticFriction is greater than 1. Is it because the normal force of the initial position is too small so that the friction force cannot overcome the exoskeleton gravity? I think StaticFriction is less than 1 is the actual situation. Could you tell me how to solve this problem? Thank you very much.
Please check that the base frame you are using has a normal direction positive in the direction you want to apply the normal force in, i think this could be an issue if it is opposite.
Please see this explanation on the contact elements.
It can also be that you are missing contact elements i can not judge this based on the description.
Long time no see, thank you very much for your reply. My base frame is the exoskeleton, and the target frame is the human thigh. In the inverse dynamic analysis, the normal force direction is backward from the target frame. My base and target reference frames are in the same direction. Now the normal direction of my baseframe is forward, but the normal force appears backward, but when I adjusted the base and target frame to the same direction as the normal force, and the exoskeleton will reverse when running the analysis.Could you tell me how to solve it?Thank you very much.
Best regards
babaozhou
I would create a new node on the exo in each of locations you would like to have the force. Then used ARel to obtain the normal direction needed. Then use these new nodes as baseframes for the contact.
Thank you for your reply. I now have four nodes on the exoskeleton. Could you tell me what does used ARel to obtain the normal direction needed mean? Is the normal direction of the node reference frame consistent with the normal force? Thanks again.
I would use ARel of each of the nodes so that you have a direction either x,y or z which is normal to your geomtry... so in this case pointing towards the center. Then in the Direction option of the contact element choose this direction. as the first compoment. So if X points towards center Direction would be {0,1,2} if you choose to have y as normal to surface it would be {1,2,0}
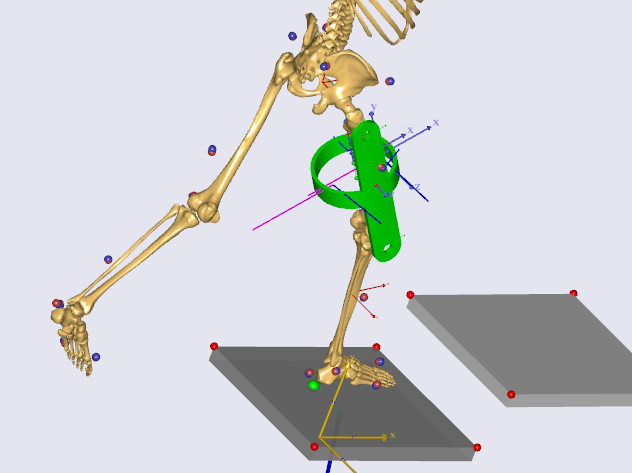
Thank you again for your reply. I think I did this. I use ARel for each node. I also use ARel=RotMat(...,y) to make the reference frame of the exoskeleton node consistent with the direction of human reference frame. The X direction of my front and back nodes is the normal direction. So AnyIntArray Direction={0,1,2};, the Z direction of the left and right nodes is the normal direction. So AnyIntArray Direction={2,0,1}, I think the normal direction I chose is correct. You can see the picture above. The direction of my nodes reference frame is opposite to the normal force direction. Is this the cause of the problem? Thank you in advance.
It sounds partly correct... but you need to ensure that the normal direction is also positive in the direction from the surface so the normals you use, must in this case all points towards the center.