Hello,
I am currently evaluating attempts to overcome an inclined plane and would like to use the GFR prediction for this. However, I am failing to implement the inclined plane successfully. I have already entered a ramp under globalref. However, the calculation does not produce any useful moments. Does anyone have any ideas on how to solve this? The level is also provided with markers, but not yet integrated into the environment. Would that be an idea? If so, what would be the approach? I would be very grateful for any tips, as I have not been working with the program for long.
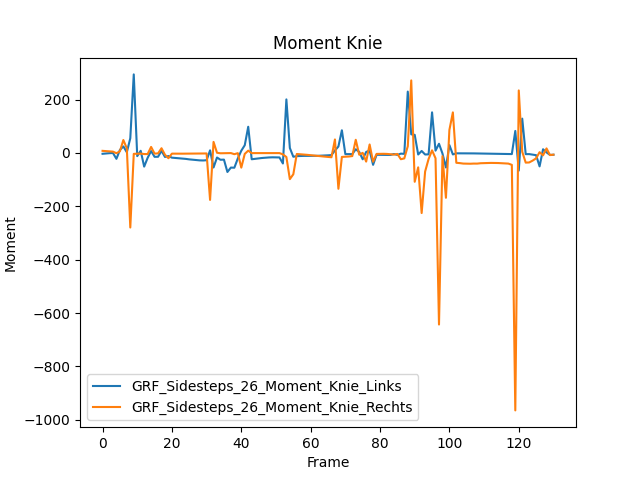
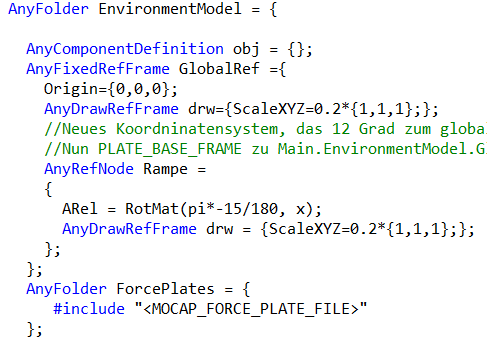
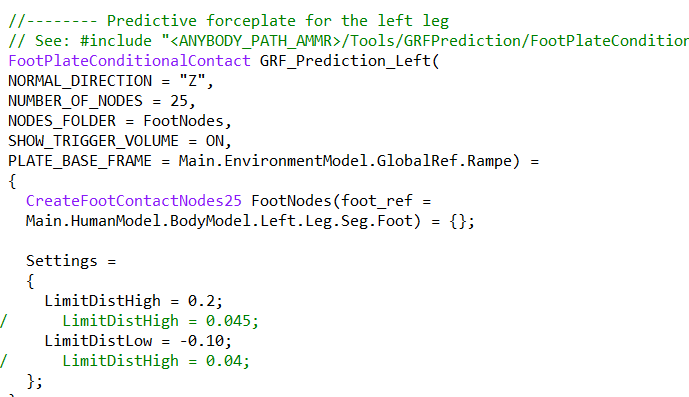
The pictures shows the current moment progression and the ramp code.
You would also need to update the settings in the GRF prediction class template to use this new reference node that you have defined to simulate the inclined plane.
There will be a file called ForcePlates.any where you can find the following code:
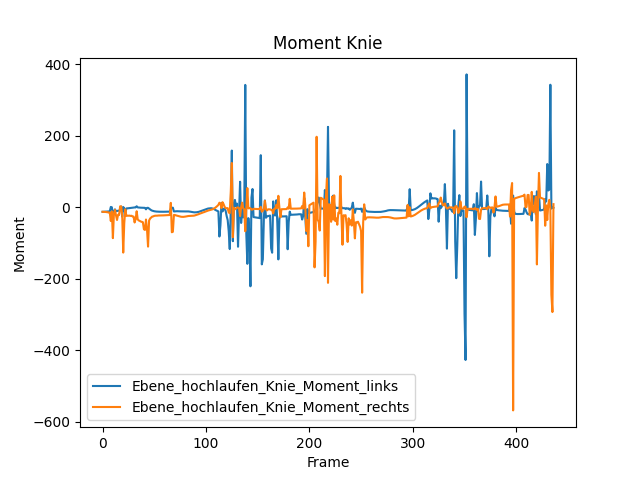
Thank you for your reply. Unfortunately, despite the inclusion of the ramp, the torque curves still do not make sense. The moments oscillate very strongly and are sometimes very high (over 200).
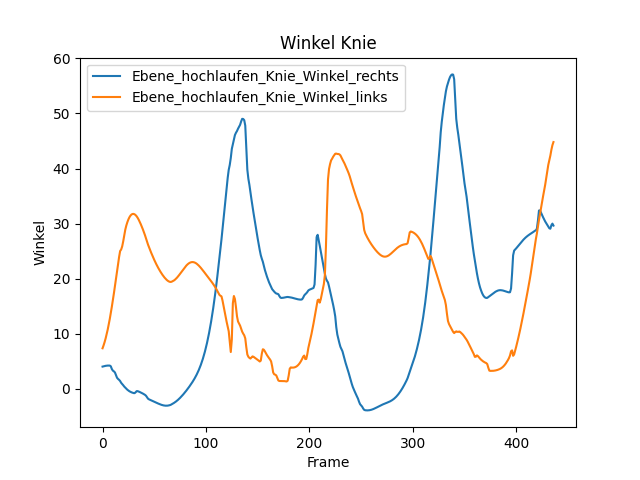
However, the angles seem normal.
Here is my updated Code:
Could the reason be that the calculation cannot be performed correctly due to the inclined base?
Normally, the inclined plane should not be a problem by itself.
I suppose I am looking at the knee moment and angle graphs for the left and right legs.
I am a little bit concerned about the quality of the mocap data. The joint angle graph looks a little bit noisy and this is not good. Especially, since we are doing inverse dynamics analysis, what would really make a difference is the acceleration data. If you can check the acceleration data, and you see noise that is similar to the noise/artefacts in the moment data, then than would explain a lot.
Secondly, you may see some artefacts around the transition between contact and no contact. The contact conditions can be a little bit finicky to get right with the mocap data. For example, the subject had already reached heel strike but the model is still not detecting heel strike. Normally, that would translate to some artefacts only around the transition and not during the rest of the motion.