I'm currently struggling to grasp how the muscle forces are computed and recorded in the XML file after employing the AnyMechOutputFileForceExport function.
Could the process when utilizing this feature in AnyBody be explained to me?
You can always check our Ref. Manual, it normally contains all the information and some class examples. Secondly, one can always search forum for the relevant keyword.
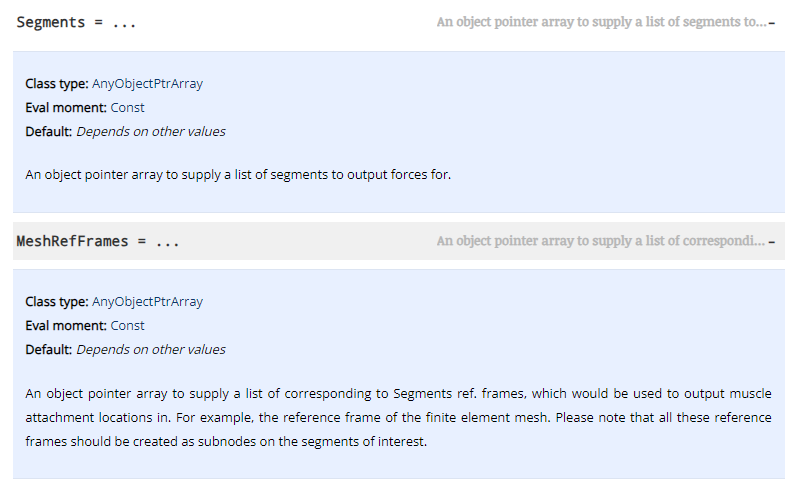
But the AnyMechOutputFileForceExport class uses two object arrays for the segments of interest and corresponding ref. frames that are used to output muscle and other forces:
I checked the manual, but it either does not provide the answer I need or I did not understand it fully.
Could you please explain the calculations used in AnyBody to convert muscle forces (which I understand are represented as Fm in the model) into the forces decomposed into the three spatial directions in the XML file?
I am encountering unit issues when implementing the muscle forces in my FE model, so understanding this process would be very helpful for me.
In the object for outputting forces you specify a desired ref. frame. The AMS will decompose everything according to the ref. frame of interest.
Could you be more specific which forces and units you are having problems with? All muscle forces should be in Newtons (except artificial rotation muscles).
I understood that the forces are measured in Newtons, but I realized that using the converter to change the units (from meters to millimeters) also multiplies the muscle forces by 1000.
My current issue is that when running the simulation in Abaqus, the movement differs from the model in AMS. The range of motion in Abaqus is significantly smaller, and I am trying to resolve this discrepancy.