Hi,
I’m Donghwan Lee.
I have a question,
- How to change the axis?
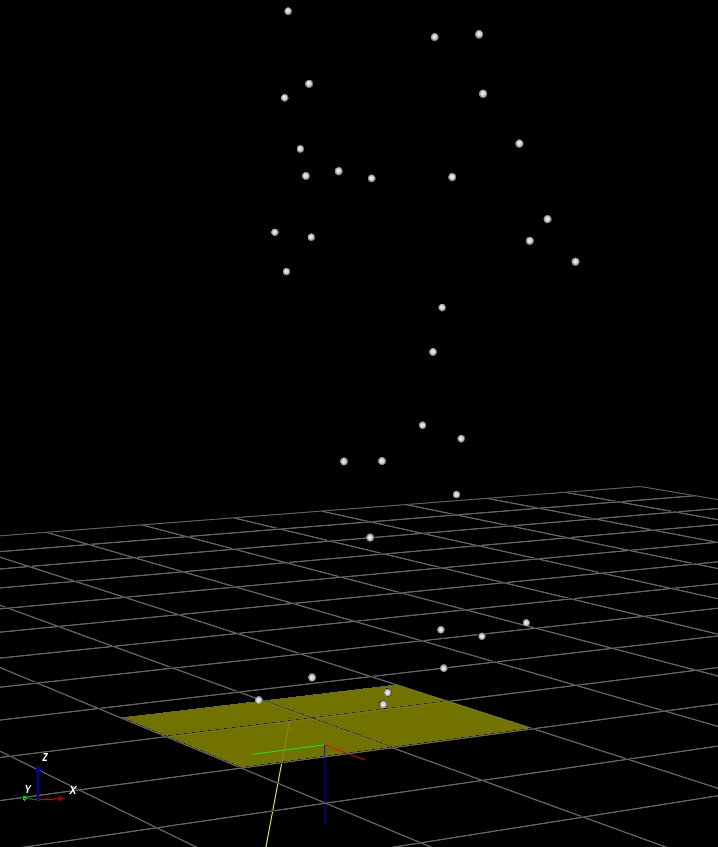
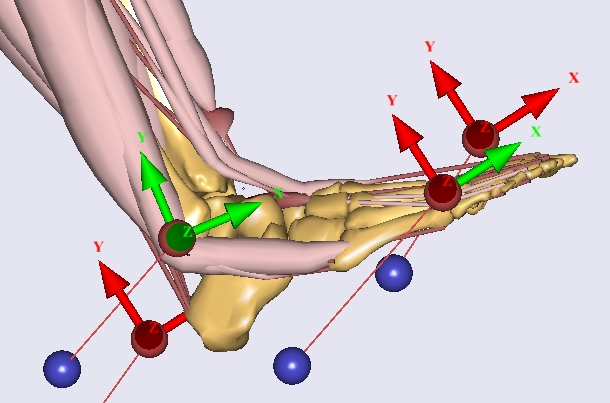
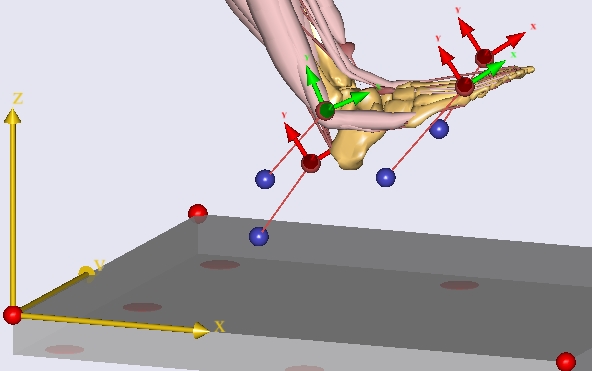
a) Axis between the force plate and foot are different(y-axis and z-axis). How
can they match?
Thank you.
Best regards,
Donghwan Lee
Hi,
I’m Donghwan Lee.
I have a question,
Thank you.
Best regards,
Donghwan Lee
Hi Donghwan Lee
I don’t know which version of Anybody you are using. In the Anybody 7.1 version, you can modify the coordinates in Setup/LabSpecificData.any and MarkerProtocol.any to match them. Hope it helps.
Best wishes
zzs
Thank you for your answer.
I use AnyBody 7.2 version. By the way, I also checked MarkerProtocol as well. I really want to know how to change the direction of the axis. The axis between the force plate and foot are different(See y-axis and z-axis). My question is about the matching axis, not for coordinates. Do you have any idea about this?
Best regards
Donghwan Lee
Hi
You can look at this. Hope it helps you
https://github.com/AnyBody/support/wiki/How-to-setup-your-own-MoCap-driven-Model
But I tried it according to this tutorial and found that the direction of the axis has not changed. I don’t know where to modify VerticalDirection="Z’’.
Best wishes
zzs
If you use a normal C3D file, which contains the force plate data - the only thing that needs to be updated is the gravity vector. The model will detect orientation of the force plates and they will match your markers. In case you data comes from different sources that are not synchronized - you may need to change some settings.
Kind regards,
Pavel
Thank you Pavel,
My thinking was same like you said, but the results are not what i expected. Axis of the force plate is auto-detected. However, axis of body markers haven’t changed. What setting do i have to modify?
Kind regards,
Donghwan Lee
I suspect that there is no need to orient them like you want. These virtual markers are defined wrt. to the local segmental axes and hence do not affect the kinematics. Do you run into problems with them?
Hi Pavel
I use the C3D data from Vicon. Do I just need to change the gravity to the Z direction? I see VerticalDirection="Z’’ in the tutorial. Does this need to be adjusted? Thank you for your help.
Best wishes
zzs
Just the gravity. The wiki page that you referred to was written using a somewhat old version of AnyBody - it is mentioned at the top of the page.
Yes, I got problems when I run my model. Kinetic values come out abnormal. I think the reason is from a different axis between the force plate and body markers.
Body marker orientation is not directly linked with kinetics. The error between virtual markers and experimental ones is being minimized - the orientation should not matter. If the motion looks good and the human walks visually okay over the force plates (which is the case in your screenshot) - the problem is elsewhere.
Regards,
Pavel
Thank you for your detail answers, Pavel.
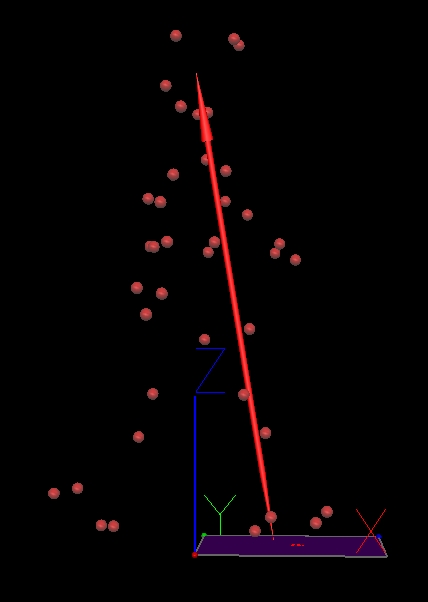
When I checked the c3d file from Visual3D, it is just okay but Mokka is not. The global reference frame of my gait model in Mokka is something weird. Compared to the force plate, the axis is totally different from the global reference frame. And also GRF has a problem. The direction of GRF is going down. In other words, it is opposite to the display of Visual3D even I use the same c3d. How can I fix it?
Thanks.
Best regards,
Donghwan Lee
Thanks, this information is helpful. Looking forward to learn more from you.
Regards,
Lewis
This topic was automatically closed 125 days after the last reply. New replies are no longer allowed.