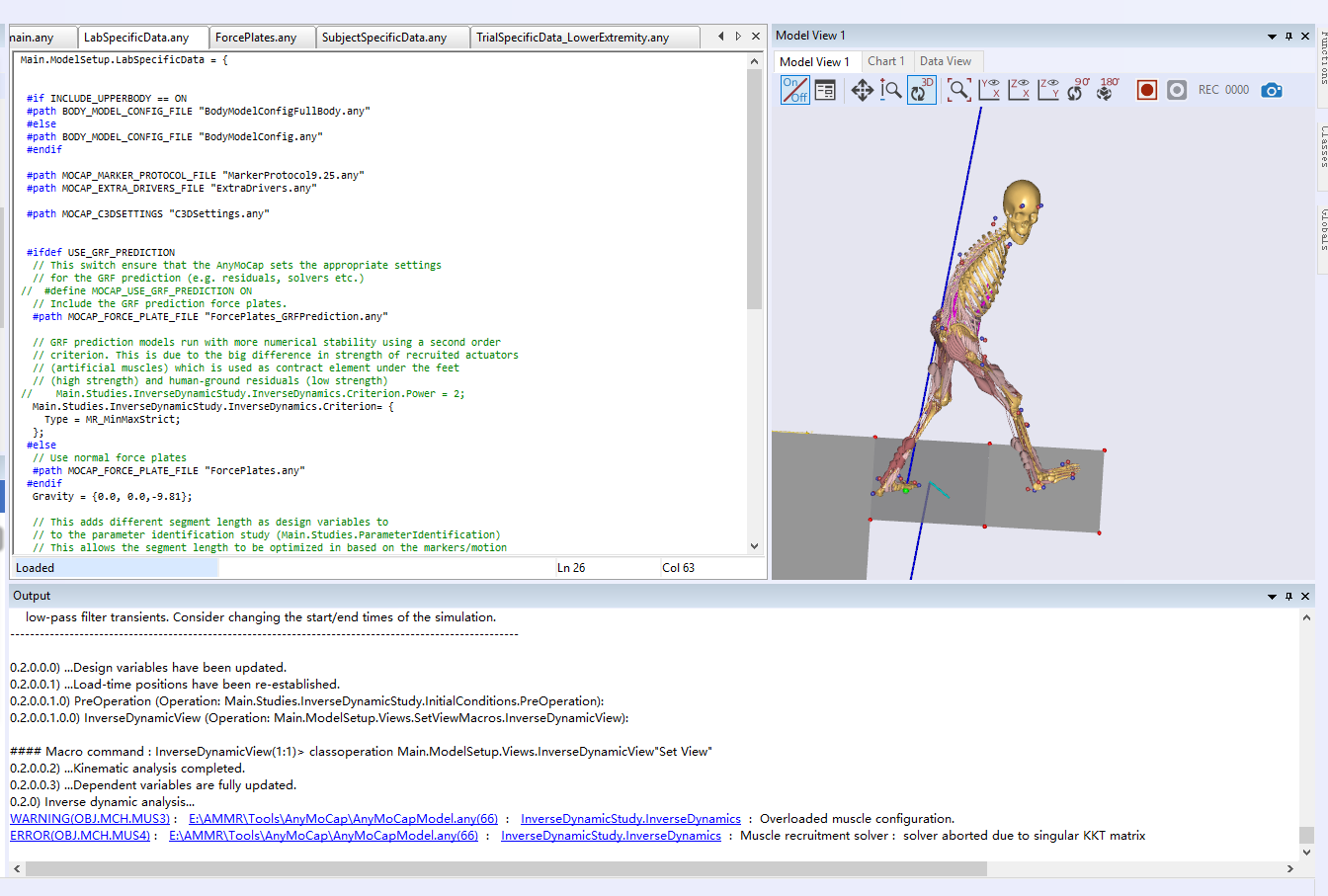
Hello!I just started learning to use anybody software to get the muscle strength of the lower limb muscles in the Taekwondo technique.There was an error in the middle:Muscle recruitment solver : solver aborted due to singular KKT matrix When I run the C3D data ‘houxuanti 03’ file collected by VICON.I searched for related discussions on the forum and saw that most of the explanations were due to imbalance。However, when I run another Taekwondo action file ‘houti01’ with the same configuration, the inverse dynamics analysis can be successfully completed, which bothers me. I will upload my action C3D files and configuration diagrams as well as the mechanical elements of kinematics and inverse dynamics here. I hope you can help me check where the problem is. I will be very grateful!
I wish you all the best !
Hello!I just started learning to use anybody software to get the muscle strength of the lower limb muscles in the Taekwondo technique.There was an error in the middle:Muscle recruitment solver : solver aborted due to singular KKT matrix When I run the C3D data ‘houxuanti 03’ file collected by VICON.I searched for related discussions on the forum and saw that most of the explanations were due to imbalance。However, when I run another Taekwondo action file ‘houti01’ with the same configuration, the inverse dynamics analysis can be successfully completed, which bothers me. I will upload my action C3D files and configuration diagrams as well as the mechanical elements of kinematics and inverse dynamics here. I hope you can help me check where the problem is. I will be very grateful!
I wish you all the best !
Total number of constraints:
Joints: 95
Drivers: 139
Other: 0
Total: 234
List of reaction forces:
0: Main.HumanModel.BodyModel.Trunk.JointsLumbar.SacrumPelvisJnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): PelvisSeg SacrumSeg
1: Main.HumanModel.BodyModel.Trunk.JointsLumbar.SacrumPelvisReaction (3 active of 3 reactions) Segments(2): PelvisSeg SacrumSeg
2: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L5SacrumJnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): SacrumSeg L5Seg
3: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L4L5Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L5Seg L4Seg
4: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L3L4Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L4Seg L3Seg
5: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L2L3Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L3Seg L2Seg
6: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L1L2Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L2Seg L1Seg
7: Main.HumanModel.BodyModel.Trunk.JointsLumbar.T12L1Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L1Seg ThoraxSeg
8: Main.HumanModel.BodyModel.Trunk.JointsLumbar.SpineRhythmDrv.Reaction (0 active of 18 reactions) Segments(8): PelvisSeg SacrumSeg L5Seg L4Seg L3Seg L2Seg L1Seg ThoraxSeg
9: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.T1C7Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): ThoraxSeg C7Seg
10: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C7C6Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C7Seg C6Seg
11: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C6C5Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C6Seg C5Seg
12: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C5C4Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C5Seg C4Seg
13: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C4C3Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C4Seg C3Seg
14: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C3C2Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C3Seg C2Seg
15: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C2C1Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): C2Seg C1Seg
16: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): C1Seg SkullSeg
17: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.Flexion.CervicalFlexionRhythmDrv.Reaction (0 active of 6 reactions) Segments(9): SkullSeg ThoraxSeg C1Seg C3Seg C2Seg C4Seg C5Seg C6Seg C7Seg
18: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.LateralBending.CervicalLateralBendingRhythmDrv.Reaction (0 active of 5 reactions) Segments(7): C3Seg C2Seg C4Seg C5Seg C6Seg C7Seg ThoraxSeg
19: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.Rotation.CervicalRotationRhythmDrv.Reaction (0 active of 6 reactions) Segments(9): SkullSeg ThoraxSeg C2Seg C1Seg C3Seg C4Seg C5Seg C6Seg C7Seg
20: Main.HumanModel.BodyModel.Right.Leg.Jnt.Ankle.Constraints.Reaction (5 active of 5 reactions) Segments(2): Shank Talus
21: Main.HumanModel.BodyModel.Right.Leg.Jnt.SubTalar.Constraints.Reaction (5 active of 5 reactions) Segments(2): Talus Foot
22: Main.HumanModel.BodyModel.Right.Leg.Jnt.Knee.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Shank
23: Main.HumanModel.BodyModel.Right.Leg.Jnt.PatellaFemur.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Patella
24: Main.HumanModel.BodyModel.Right.Leg.Jnt.PatellaMovement.Reaction (1 active of 1 reactions) Segments(2): Patella Shank
25: Main.HumanModel.BodyModel.Right.Leg.Jnt.Hip.Constraints.Reaction (3 active of 3 reactions) Segments(2): Thigh PelvisSeg
26: Main.HumanModel.BodyModel.Left.Leg.Jnt.Ankle.Constraints.Reaction (5 active of 5 reactions) Segments(2): Shank Talus
27: Main.HumanModel.BodyModel.Left.Leg.Jnt.SubTalar.Constraints.Reaction (5 active of 5 reactions) Segments(2): Talus Foot
28: Main.HumanModel.BodyModel.Left.Leg.Jnt.Knee.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Shank
29: Main.HumanModel.BodyModel.Left.Leg.Jnt.PatellaFemur.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Patella
30: Main.HumanModel.BodyModel.Left.Leg.Jnt.PatellaMovement.Reaction (1 active of 1 reactions) Segments(2): Patella Shank
31: Main.HumanModel.BodyModel.Left.Leg.Jnt.Hip.Constraints.Reaction (3 active of 3 reactions) Segments(2): Thigh PelvisSeg
32: Main.EnvironmentModel.ForcePlates.Plate1.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
33: Main.EnvironmentModel.ForcePlates.Plate2.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
34: Main.EnvironmentModel.ForcePlates.Plate3.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
35: Main.EnvironmentModel.ForcePlates.Plate4.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
36: Main.ModelSetup.MocapDrivers.LPSIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
37: Main.ModelSetup.MocapDrivers.RPSIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
38: Main.ModelSetup.MocapDrivers.RASIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
39: Main.ModelSetup.MocapDrivers.LASIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
40: Main.ModelSetup.MocapDrivers.RFHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
41: Main.ModelSetup.MocapDrivers.LFHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
42: Main.ModelSetup.MocapDrivers.RBHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
43: Main.ModelSetup.MocapDrivers.LBHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
44: Main.ModelSetup.MocapDrivers.STRN.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
45: Main.ModelSetup.MocapDrivers.CLAV.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
46: Main.ModelSetup.MocapDrivers.T10.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
47: Main.ModelSetup.MocapDrivers.C7.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
48: Main.ModelSetup.MocapDrivers.RTH1.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
49: Main.ModelSetup.MocapDrivers.RLEP.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
50: Main.ModelSetup.MocapDrivers.RSK1.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
51: Main.ModelSetup.MocapDrivers.RLME.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
52: Main.ModelSetup.MocapDrivers.RHM1.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
53: Main.ModelSetup.MocapDrivers.RHEEL.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
54: Main.ModelSetup.MocapDrivers.RHM5.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
55: Main.ModelSetup.MocapDrivers.LTH1.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
56: Main.ModelSetup.MocapDrivers.LLEP.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
57: Main.ModelSetup.MocapDrivers.LSK1.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
58: Main.ModelSetup.MocapDrivers.LLME.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
59: Main.ModelSetup.MocapDrivers.LHM1.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
60: Main.ModelSetup.MocapDrivers.LHEEL.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
61: Main.ModelSetup.MocapDrivers.LHM5.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
Total number of active reaction and driver forces: 100
List of reaction forces:
0: Main.HumanModel.BodyModel.Trunk.JointsLumbar.SacrumPelvisJnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): PelvisSeg SacrumSeg
1: Main.HumanModel.BodyModel.Trunk.JointsLumbar.SacrumPelvisReaction (3 active of 3 reactions) Segments(2): PelvisSeg SacrumSeg
2: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L5SacrumJnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): SacrumSeg L5Seg
3: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L4L5Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L5Seg L4Seg
4: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L3L4Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L4Seg L3Seg
5: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L2L3Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L3Seg L2Seg
6: Main.HumanModel.BodyModel.Trunk.JointsLumbar.L1L2Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L2Seg L1Seg
7: Main.HumanModel.BodyModel.Trunk.JointsLumbar.T12L1Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L1Seg ThoraxSeg
8: Main.HumanModel.BodyModel.Trunk.JointsLumbar.SpineRhythmDrv.Reaction (0 active of 18 reactions) Segments(8): PelvisSeg SacrumSeg L5Seg L4Seg L3Seg L2Seg L1Seg ThoraxSeg
9: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.T1C7Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): ThoraxSeg C7Seg
10: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C7C6Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C7Seg C6Seg
11: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C6C5Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C6Seg C5Seg
12: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C5C4Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C5Seg C4Seg
13: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C4C3Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C4Seg C3Seg
14: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C3C2Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): C3Seg C2Seg
15: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C2C1Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): C2Seg C1Seg
16: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): C1Seg SkullSeg
17: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.Flexion.CervicalFlexionRhythmDrv.Reaction (0 active of 6 reactions) Segments(9): SkullSeg ThoraxSeg C1Seg C3Seg C2Seg C4Seg C5Seg C6Seg C7Seg
18: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.LateralBending.CervicalLateralBendingRhythmDrv.Reaction (0 active of 5 reactions) Segments(7): C3Seg C2Seg C4Seg C5Seg C6Seg C7Seg ThoraxSeg
19: Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.Rotation.CervicalRotationRhythmDrv.Reaction (0 active of 6 reactions) Segments(9): SkullSeg ThoraxSeg C2Seg C1Seg C3Seg C4Seg C5Seg C6Seg C7Seg
20: Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.Slider1Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): BuckleSeg Seg
21: Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.SliderReaction (1 active of 1 reactions) Segments(2): BuckleSeg Seg
22: Main.HumanModel.BodyModel.Trunk.Buckle.Slider1.LinDrv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg Seg
23: Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.Slider1Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): BuckleSeg Seg
24: Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.SliderReaction (1 active of 1 reactions) Segments(2): BuckleSeg Seg
25: Main.HumanModel.BodyModel.Trunk.Buckle.Slider2.LinDrv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg Seg
26: Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.Slider1Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): BuckleSeg Seg
27: Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.SliderReaction (1 active of 1 reactions) Segments(2): BuckleSeg Seg
28: Main.HumanModel.BodyModel.Trunk.Buckle.Slider3.LinDrv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg Seg
29: Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.Slider1Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): BuckleSeg Seg
30: Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.SliderReaction (1 active of 1 reactions) Segments(2): BuckleSeg Seg
31: Main.HumanModel.BodyModel.Trunk.Buckle.Slider4.LinDrv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg Seg
32: Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.Slider1Jnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): BuckleSeg Seg
33: Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.SliderReaction (1 active of 1 reactions) Segments(2): BuckleSeg Seg
34: Main.HumanModel.BodyModel.Trunk.Buckle.Slider5.LinDrv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg Seg
35: Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L1Seg DiscSeg
36: Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.reaction (3 active of 3 reactions) Segments(2): L1Seg DiscSeg
37: Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.LinDrvRight.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
38: Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.LinDrvLeft.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
39: Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.LinDrvMid.Reaction (0 active of 1 reactions) Segments(3): PelvisSeg ThoraxSeg DiscSeg
40: Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.VirtuelSegDiscJnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): DiscSeg VirtuelSeg
41: Main.HumanModel.BodyModel.Trunk.Buckle.Disc1.Disc.drv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg VirtuelSeg
42: Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L2Seg DiscSeg
43: Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.reaction (3 active of 3 reactions) Segments(2): L2Seg DiscSeg
44: Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.LinDrvRight.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
45: Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.LinDrvLeft.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
46: Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.LinDrvMid.Reaction (0 active of 1 reactions) Segments(3): PelvisSeg ThoraxSeg DiscSeg
47: Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.VirtuelSegDiscJnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): DiscSeg VirtuelSeg
48: Main.HumanModel.BodyModel.Trunk.Buckle.Disc2.Disc.drv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg VirtuelSeg
49: Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L3Seg DiscSeg
50: Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.reaction (3 active of 3 reactions) Segments(2): L3Seg DiscSeg
51: Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.LinDrvRight.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
52: Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.LinDrvLeft.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
53: Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.LinDrvMid.Reaction (0 active of 1 reactions) Segments(3): PelvisSeg ThoraxSeg DiscSeg
54: Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.VirtuelSegDiscJnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): DiscSeg VirtuelSeg
55: Main.HumanModel.BodyModel.Trunk.Buckle.Disc3.Disc.drv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg VirtuelSeg
56: Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L4Seg DiscSeg
57: Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.reaction (3 active of 3 reactions) Segments(2): L4Seg DiscSeg
58: Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.LinDrvRight.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
59: Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.LinDrvLeft.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
60: Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.LinDrvMid.Reaction (0 active of 1 reactions) Segments(3): PelvisSeg ThoraxSeg DiscSeg
61: Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.VirtuelSegDiscJnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): DiscSeg VirtuelSeg
62: Main.HumanModel.BodyModel.Trunk.Buckle.Disc4.Disc.drv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg VirtuelSeg
63: Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Jnt.Constraints.Reaction (3 active of 3 reactions) Segments(2): L5Seg DiscSeg
64: Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.reaction (3 active of 3 reactions) Segments(2): L5Seg DiscSeg
65: Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.LinDrvRight.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
66: Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.LinDrvLeft.Reaction (0 active of 1 reactions) Segments(4): PelvisSeg ThoraxSeg Seg DiscSeg
67: Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.LinDrvMid.Reaction (0 active of 1 reactions) Segments(3): PelvisSeg ThoraxSeg DiscSeg
68: Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.VirtuelSegDiscJnt.Constraints.Reaction (5 active of 5 reactions) Segments(2): DiscSeg VirtuelSeg
69: Main.HumanModel.BodyModel.Trunk.Buckle.Disc5.Disc.drv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg VirtuelSeg
70: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.LinTopDrv.Reaction (0 active of 3 reactions) Segments(2): DiscSeg BuckleSeg
71: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.RotTopDrv.Reaction (0 active of 1 reactions) Segments(2): DiscSeg BuckleSeg
72: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.LinBottomDrv.Reaction (0 active of 2 reactions) Segments(2): DiscSeg BuckleSeg
73: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentRight.LinCon.Reaction (3 active of 3 reactions) Segments(2): PelvisSeg Seg
74: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentRight.RotReac (3 active of 3 reactions) Segments(2): PelvisSeg Seg
75: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentRight.Drv1.Reaction (0 active of 2 reactions) Segments(2): Seg ThoraxSeg
76: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentRight.Drv2.Reaction (0 active of 1 reactions) Segments(2): PelvisSeg Seg
77: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentLeft.LinCon.Reaction (3 active of 3 reactions) Segments(2): PelvisSeg Seg
78: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentLeft.RotReac (3 active of 3 reactions) Segments(2): PelvisSeg Seg
79: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentLeft.Drv1.Reaction (0 active of 2 reactions) Segments(2): Seg ThoraxSeg
80: Main.HumanModel.BodyModel.Trunk.Buckle.JointsAndDrivers.MeasuringSegmentLeft.Drv2.Reaction (0 active of 1 reactions) Segments(2): PelvisSeg Seg
81: Main.HumanModel.BodyModel.Right.Leg.Jnt.Ankle.Constraints.Reaction (5 active of 5 reactions) Segments(2): Shank Talus
82: Main.HumanModel.BodyModel.Right.Leg.Jnt.SubTalar.Constraints.Reaction (5 active of 5 reactions) Segments(2): Talus Foot
83: Main.HumanModel.BodyModel.Right.Leg.Jnt.Knee.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Shank
84: Main.HumanModel.BodyModel.Right.Leg.Jnt.Hip.Constraints.Reaction (3 active of 3 reactions) Segments(2): Thigh PelvisSeg
85: Main.HumanModel.BodyModel.Right.Leg.Jnt.PatellaFemur.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Patella
86: Main.HumanModel.BodyModel.Right.Leg.Jnt.PatellaMovement.Reaction (1 active of 1 reactions) Segments(2): Patella Shank
87: Main.HumanModel.BodyModel.Left.Leg.Jnt.Ankle.Constraints.Reaction (5 active of 5 reactions) Segments(2): Shank Talus
88: Main.HumanModel.BodyModel.Left.Leg.Jnt.SubTalar.Constraints.Reaction (5 active of 5 reactions) Segments(2): Talus Foot
89: Main.HumanModel.BodyModel.Left.Leg.Jnt.Knee.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Shank
90: Main.HumanModel.BodyModel.Left.Leg.Jnt.Hip.Constraints.Reaction (3 active of 3 reactions) Segments(2): Thigh PelvisSeg
91: Main.HumanModel.BodyModel.Left.Leg.Jnt.PatellaFemur.Constraints.Reaction (5 active of 5 reactions) Segments(2): Thigh Patella
92: Main.HumanModel.BodyModel.Left.Leg.Jnt.PatellaMovement.Reaction (1 active of 1 reactions) Segments(2): Patella Shank
93: Main.EnvironmentModel.ForcePlates.Plate1.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
94: Main.EnvironmentModel.ForcePlates.Plate2.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
95: Main.EnvironmentModel.ForcePlates.Plate3.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
96: Main.EnvironmentModel.ForcePlates.Plate4.ForcePlateDriver.Reaction (0 active of 6 reactions) Segments(1): ForcePlateSeg
97: Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.HumanGroundResiduals (6 active of 6 reactions) Segments(1): PelvisSeg
98: Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverTrunkFull.Reaction (0 active of 47 reactions) Segments(16): PelvisSeg SacrumSeg L5Seg L4Seg L3Seg L2Seg L1Seg ThoraxSeg C7Seg C6Seg C5Seg C4Seg C3Seg C2Seg C1Seg SkullSeg
99: Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverLeftLegTD.Reaction (0 active of 6 reactions) Segments(5): PelvisSeg Thigh Shank Talus Foot
100: Main.Studies.InverseDynamicStudy.ModelEnvironmentConnection.JointsAndDrivers.JntDriverRightLegTD.Reaction (0 active of 6 reactions) Segments(5): PelvisSeg Thigh Shank Talus Foot
101: Main.ModelSetup.MocapDrivers.LPSIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
102: Main.ModelSetup.MocapDrivers.RPSIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
103: Main.ModelSetup.MocapDrivers.RASIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
104: Main.ModelSetup.MocapDrivers.LASIS.Driver.Reaction (0 active of 3 reactions) Segments(1): PelvisSeg
105: Main.ModelSetup.MocapDrivers.RFHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
106: Main.ModelSetup.MocapDrivers.LFHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
107: Main.ModelSetup.MocapDrivers.RBHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
108: Main.ModelSetup.MocapDrivers.LBHD.Driver.Reaction (0 active of 3 reactions) Segments(1): SkullSeg
109: Main.ModelSetup.MocapDrivers.STRN.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
110: Main.ModelSetup.MocapDrivers.CLAV.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
111: Main.ModelSetup.MocapDrivers.T10.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
112: Main.ModelSetup.MocapDrivers.C7.Driver.Reaction (0 active of 3 reactions) Segments(1): ThoraxSeg
113: Main.ModelSetup.MocapDrivers.RTH1.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
114: Main.ModelSetup.MocapDrivers.RLEP.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
115: Main.ModelSetup.MocapDrivers.RSK1.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
116: Main.ModelSetup.MocapDrivers.RLME.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
117: Main.ModelSetup.MocapDrivers.RHM1.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
118: Main.ModelSetup.MocapDrivers.RHEEL.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
119: Main.ModelSetup.MocapDrivers.RHM5.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
120: Main.ModelSetup.MocapDrivers.LTH1.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
121: Main.ModelSetup.MocapDrivers.LLEP.Driver.Reaction (0 active of 3 reactions) Segments(1): Thigh
122: Main.ModelSetup.MocapDrivers.LSK1.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
123: Main.ModelSetup.MocapDrivers.LLME.Driver.Reaction (0 active of 3 reactions) Segments(1): Shank
124: Main.ModelSetup.MocapDrivers.LHM1.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
125: Main.ModelSetup.MocapDrivers.LHEEL.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
126: Main.ModelSetup.MocapDrivers.LHM5.Driver.Reaction (0 active of 3 reactions) Segments(1): Foot
Total number of active reaction and driver forces: 203
I can see from your image that you changed quite a lot in your model.
I would start by setting the muscle recruitment criterion to 2 again. That should give some more stability to the solver.
Also consider to try using the simple muscle models first before moving to the 3E hill type. You need to be careful about the calibrations of the hill type models.
There seems to be a warning about your start and end times in your c3d file - try and look into that.
For more help on adjusting your model to your data - please have a look on our wiki page here:
Dear Bjorn:
Thank you for your reply.As a beginner, although I read the official tutorial, I still don’t know some settings of anybody software.The first is about muscle correction. When the analysis operation is run, the output display will perform muscle correction, as follows:
0.1.9.0) TendonLengthAdjustment (Operation: Main.HumanModel.Calibration.LeftLegCalibration3.LegCalibrationStudy3.TendonLengthAdjustment):
0.1.9.0.0) PreOperation (Operation: Main.HumanModel.Calibration.LeftLegCalibration3.LegCalibrationStudy3.TendonLengthAdjustment.PreOperation):
0.1.9.0.0.0) Kinematics (Operation: Main.HumanModel.Calibration.LeftLegCalibration3.LegCalibrationStudy3.Kinematics):
0.1.9.0.0.0.0) PreOperation (Operation: Main.HumanModel.Calibration.LeftLegCalibration3.LegCalibrationStudy3.Kinematics.PreOperation):
0.1.9.0.0.0.0.0) InitialConditions (Operation: Main.HumanModel.Calibration.LeftLegCalibration3.LegCalibrationStudy3.InitialConditions):
0.1.9.0.0.0.0.0) ...Design variables have been updated.
0.1.9.0.0.0.0.1) ...Load-time positions have been re-established.
0.1.9.0.0.0.0.2) ...Kinematic analysis completed.
0.1.9.0.0.0.0.3) ...Dependent variables are fully updated.
0.1.9.0.0.0) Kinematic analysis...
0.1.9.0.0.0) ...Kinematic analysis completed
0.1.9.0) Muscle Tendon Length Adjustment...
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(531) : TibialisAnterior1 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(546) : TibialisAnterior2 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(561) : TibialisAnterior3 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(717) : ExtensorDigitorumLongus1 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(733) : ExtensorDigitorumLongus2 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(749) : ExtensorDigitorumLongus3 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(766) : ExtensorDigitorumLongus4 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(782) : ExtensorHallucisLongus1 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(807) : ExtensorHallucisLongus2 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
NOTICE(OBJ.MCH.MUS6) : E:\AMMR\Body\AAUHuman\LegTLEM\Mus.any(834) : ExtensorHallucisLongus3 : Muscle calibration : The tendon/fiber length of the muscle was calibrated according to the executed muscle calibration and the muscle model properties have been updated.
0.1.9.0) ...Tendon Length Adjustment finished.
0.1.9.1) ...Design variables of the calibration model have been updated.
Should I modify the existing muscle calibration file to perform muscle calibration?
Taekwondo.zip (4.3 MB)
This is the configuration file and motion capture C3D file for my research on the biomechanics of Taekwondo lower limbs. If you have time, I hope to help me see where the problem is and how to adjust it, thanks!
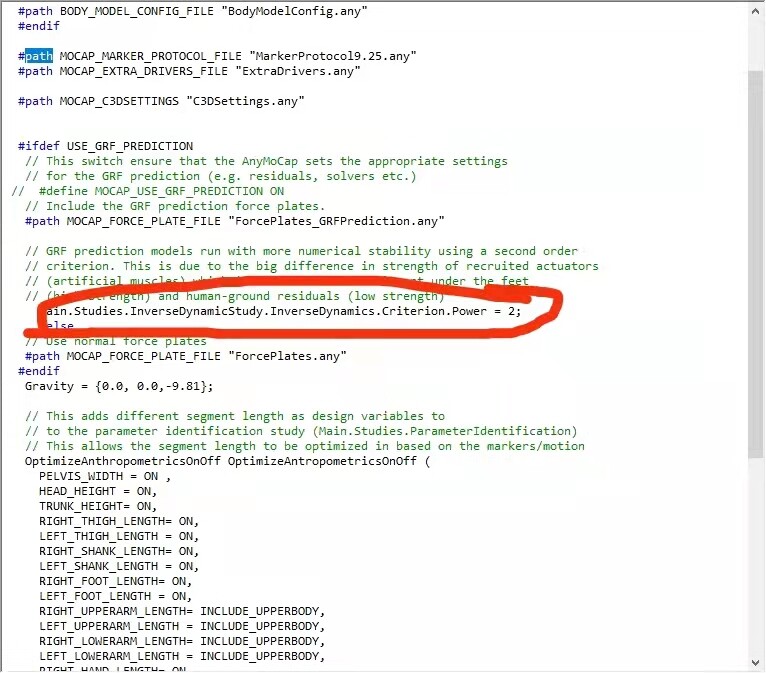
The setting of the muscle recruitment mode in the predictive ground reaction mode is shown in the red circle in the figure. What is the setting of the muscle recruitment mode in the non-predictive ground reaction mode?
Muscle calibration is hard so please remember to do sanity checks that the calibration works as expected - it is not perfect by default so adjustment to calibration postures might be needed.
In the ammr mocap examples models not using the GRF prediction defaults to a cubic muscle recruitment criterion.
I looked quickly at you model and noticed that your head markers are switched in one of the trials. Be aware of this and try and switch the RFHD/LFHD and RBHD/LBHD markers.
You can do something like this in the C3DSettings.any:
Hi!Nickel_Lee
Thank you for your reply. The muscle recruitment mode here is in the predictive ground reaction model, and I want to know where the muscle recruitment mode in the lower limb non-predictive ground reaction model is modified? (I am not sure whether the muscle recruitment mode of the predictive ground reaction model and the lower limb non-predictive ground reaction model are set in the same position, but according to the previous reply, the muscle recruitment in the non-predictive ground reaction mode defaults to 3 Power function, and the muscle recruitment of the predicted ground reaction here is the power of 2, so I think the two should be set separately)
I wish you all the best !
PengQian
The muscle recruitment criteria is set per study. So it is always located the same place.
what @Nickel_Lee does is to overwrite it, which can be done from anywhere in the script.
The GRF prediction models overwrite the default Power = 3; with this: Main.Studies.InverseDynamicStudy.InverseDynamics.Criterion.Power = 2;
since it is numerical more stable when using the GRF prediction tool.
If you look in your model tree you can find the current value by expanding to:
Main.Studies.InverseDynamicStudy.InverseDynamics.Criterion.Power