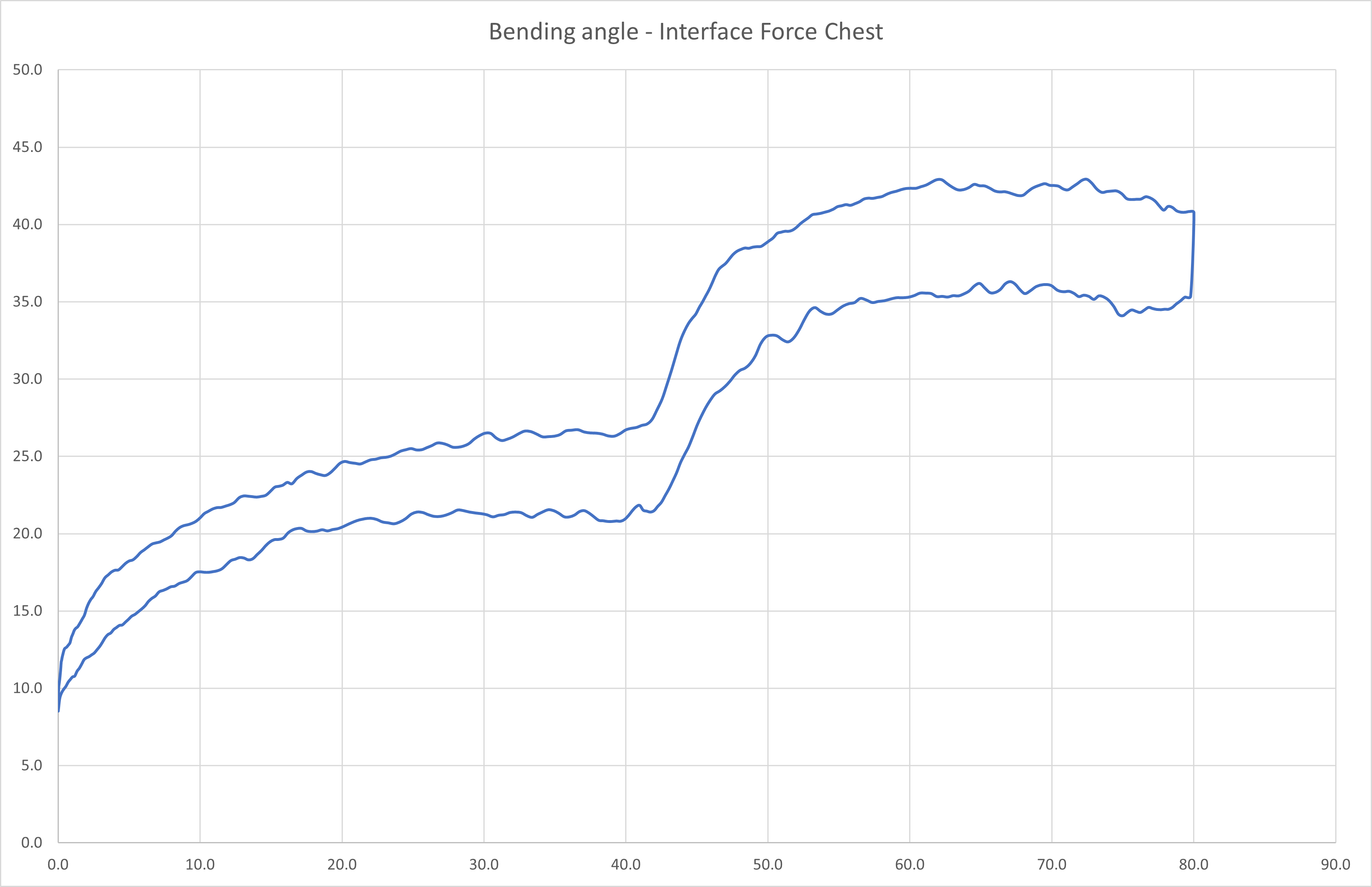
i want to measure the support of exoskeletons. Therefore i've measured the force when bending the exoskeleton with a load cell. The force-angle hysteresis is shown in the picture.
Using the Standing Model the aim is now to insert the force at the corresponding interface points (with RefNodes). The Force values should change depending on the bending angle. Does anybody know how this could work?
The first idea was to describe the hysteresis curve with a function, but function curve is not continous.
Bending angle in the Standing Model is the summary of HipFlexion and PelvisThoraxExtension, if i'm correct.
Some others in the Forum inserted force depending on time, but this couldn't help me.
Thank you in advance for any kind of help and please ask if you need any additional information.
I think it's possible to do what you want to do by making two interpolation functions (AnyFunInterpol): one for the positive velocity and one for the negative velocity. AnyFunInterpol asks for T and Data (which you can think of as parameter and dependent value) or an input file. You can also have both curves in the same interpolation function by having two columns for data and indexing for the correct one when you are using the function.
Then, when you want to use the function, you pass the pos value of your kinematic measure in the function. You can see how to do that in this recent post.
In your case, you can additionally use iffun and gtfun to select the appropriate interpolation function/curve based on the velocity of the measure. So, if the velocity > 0, use the positive direction curve, otherwise the negative curve.