Dear All,
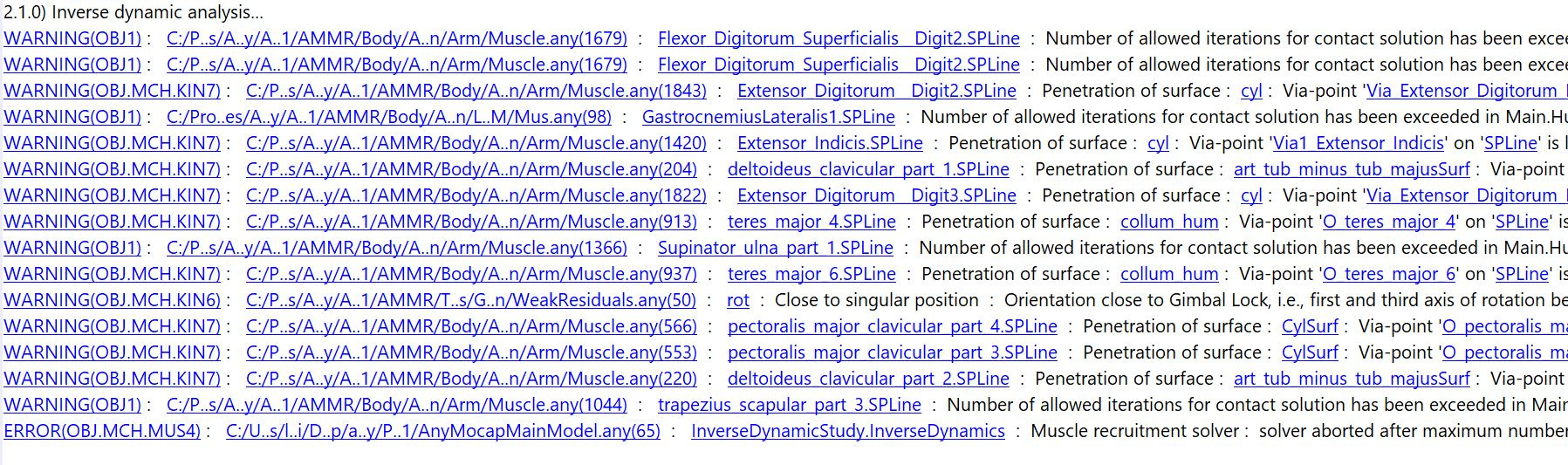
I tried to use my own gait C3D file as input of Mocap_full body GRF predicion model. I used the marker set exactly as same as examples of full body GRF_Prediction which is Vicon plug-in gait templates added one more marker named on each foot named RMT5 and LMT5. I got successful parameter identification analysis. I failed in inverse dynamics analyse when Upperbody was on as shown below:
However the inverse dynamics succeed when Upperbody was off.
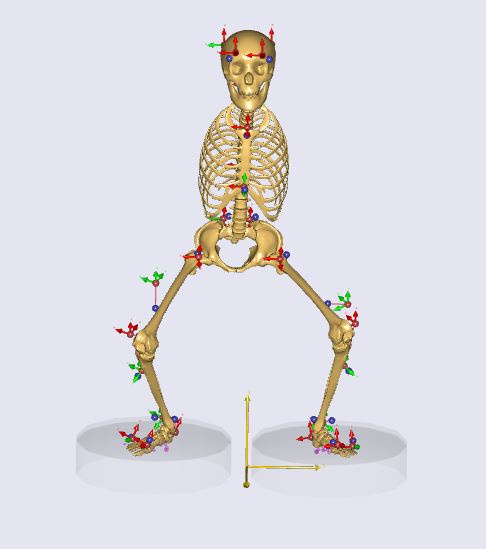
I also put the squat trial into Mocap but failed in kinematic analysis at step 59: Position analysis is not completed, even with Upperbody off.
Error is shown as figure 2:
.
I can see that the model doing squat.
Could you please tell me how to solve the position constraints problem? I can make sure that both gait trial and squat trial have no gap at all and 100% marker used.
Also, for subjectdata file, I only changed body weight and height, do I need to adjust other parameters? Or they will adjust automatically?
Thanks.
If you don't need to analyse the forces in the upper-body, then it is a good idea to exclude it from the analysis. You should really also remove the markers from the trunk and head segment, and just add the reaction force on all degrees of freedom above the pelvis.
See this post:
That should simplify your model even more.
Well first simplify your model as wrote above. That should make the model more robust. THen you can also try to improve the initial guess of the marker positions. That some times also helps.
Yes. That could also help. Marker drop-outs are not good when there are only a few markers per segment.
That should be enough in most cases. You can consider to manually adjust the strength index of the model. In the default model, strength is scaled with the hight and weight of the model, but that is not always a good assumption.
Hi Morten,
Thanks for your reply. I have a few questions about your suggestions.
delete all upper body marker. Do you mean I do it by comment all upper body markers in MarkerProtocal.any? Or I do one more measurements without upper body markers. I ask this because when I commented all upper body markers in MarkerProtocal.any and ran parameter identification, it would show error:
ERROR(SYS1) : Operation : Unknown error : ‘No Class Information’.
For adding reaction forces to upper body, I am not sure where to add those codes, I added it into BodyModelWithoutMuslces.any Trunk subfolder and saved it into a new file. Could you please tell me which file I should add those lines, is what I did correct?
You suggest to change the initial position guess. Do you mean to change the initial position of body in TrialSpecificData file?
Thanks a lot.
I noticed that the file named Extradrivers.any already has the code you wrote to the other problem. Is that necessary to add those line again? if so, where to add it?
delete all upper body marker. Do you mean I do it by comment all upper body markers in MarkerProtocal.any? Or I do one more measurements without upper body markers.
Just comment out the code in the marker protocol file. When you remove the markers, you need to add some extra drivers to for the Degrees of freedom which are no longer controlled by the markers. The easiest way is to enable some of the builtin mannequin drivers. There are examples in the ExtraDrivers.any file.
For adding reaction forces to upper body, I am not sure where to add those codes, I added it into BodyModelWithoutMuslces.any Trunk subfolder and saved it into a new file. Could you please tell me which file I should add those lines, is what I did correct?
No. It is good practice not to touch the files which are shared between application unless you really need to. If you change BodyModelWithoutMuslces.any all other MoCap based models on your machine would also be modified.
Instead, add the code in the LabSpecificData.any in your application folder. That file is shared by all your trials and subjects.
You suggest to change the initial position guess. Do you mean to change the initial position of body in TrialSpecificData file?
Yes. That is the right place to change the initial posture for a single trial.