When I run the anybody model, these warning and error occur.
WARNING(OBJ.MCH.KIN6) : Interface.any(215) : GHRot : Close to singular position : Orientation close to Gimbal Lock, i.e., first and third axis of rotation being parallel
Progressing to solve kinematic optimality conditions and hard constraints.
ERROR(OBJ.MCH.MUS4) : AnyMocapModel.any(60) : InverseDynamicStudy.InverseDynamics : Muscle recruitment solver : solver aborted after maximum number of iterations
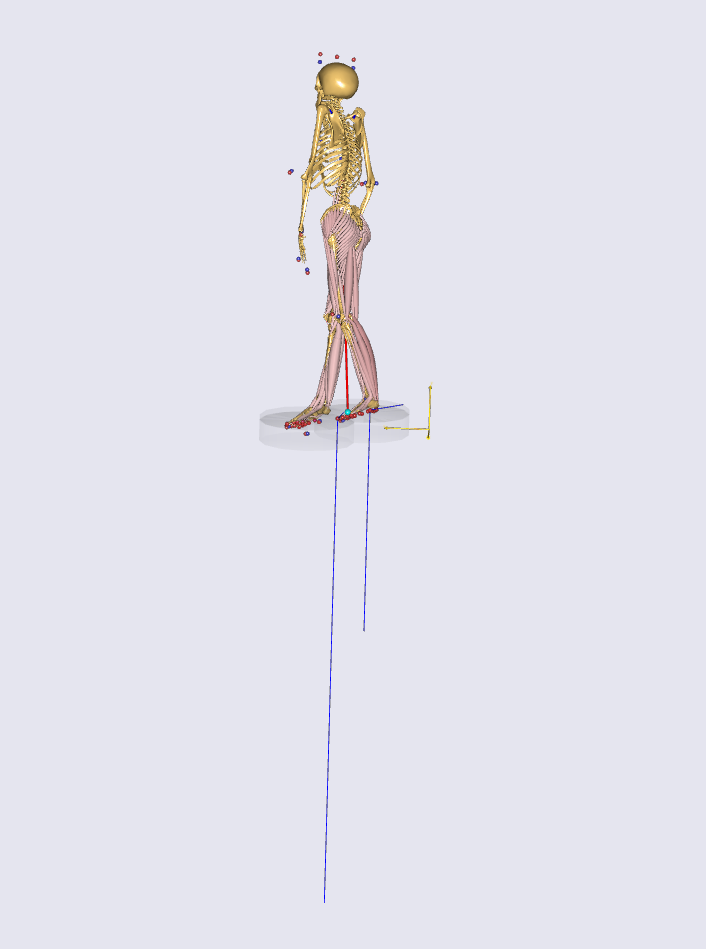
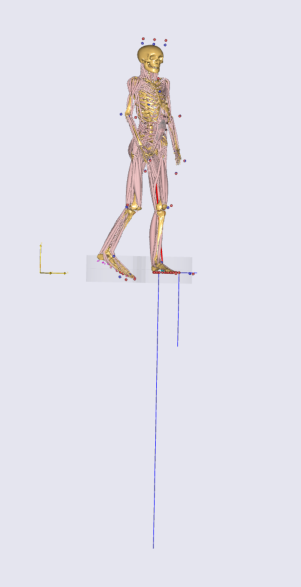
This is a captured picture at the moment the simulation is stopped.
In my opinion, this posture is not a posture that places a large load on the muscles.
Do you think there is a problem other than the GRF configuration issue?
I agree the posture should not be muscular demanding, but do you experience large muscle forces?
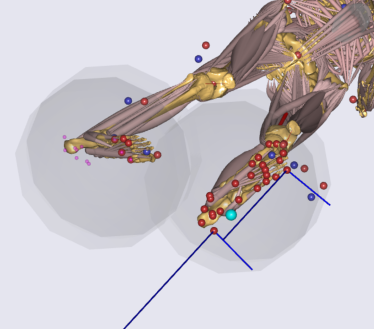
I cant really see any muscles that are over activated in the image?
You should probably try to alter some of the GRF settings to see if the load can be distributed across more nodes under the foot.