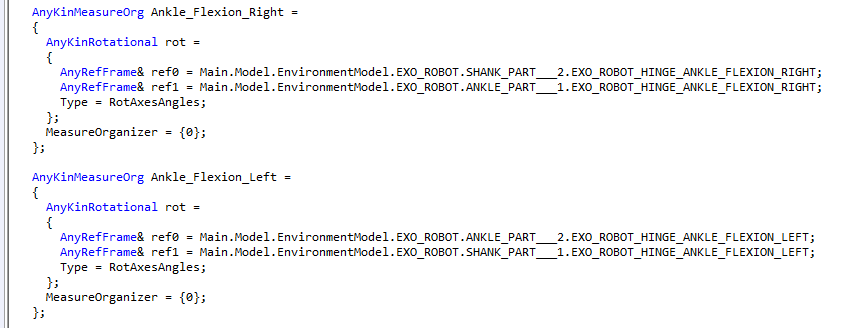
Main.Model.EnvironmentModel.EXO_ROBOT.SHANK_PART___2.EXO_ROBOT_HINGE_ANKLE_FLEXION_RIGHT is the red part while Main.Model.EnvironmentModel.EXO_ROBOT.ANKLE_PART___1.EXO_ROBOT_HINGE_ANKLE_FLEXION_RIGHT is the green one.
I think if we want to measure the Ankle_Flexion_Right , the MeasureOrganizer should be **{3}**because the axis of rotation is the z-axis.
Thank you!
Best,
TJ
The aim of the measure organizer is not to measure any angles it is used to select a certain measure - in this case the first linear measure between the two frames.
Without remembering this model completly, the snippet you have here is probably part of the connection between the exoskeleton and the human model.
A thing to be aware of when using the measure organizer is that it is not 100% given that the reference frame follow the x,y,z order, they might have z,x,y or something else..
The order of the measure organizer depends on the input.
If you put a AnyKinLinear first then the first three measures are linear and the axes order is given by that AnyKinLinear. If you put a AnyKinRotational first then the first three measures are rotations and the order given by the AnyKinRotational.
Most of the time references frames in anybody are x,y,z but you can make new ones as you please and encounter other orders. I do however advise you to be consistent with the order as it can really make it hard to grasp otherwise.