Hi Søren,
Thank you very much for your answer!
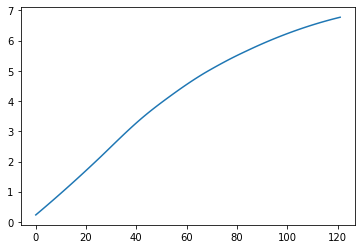
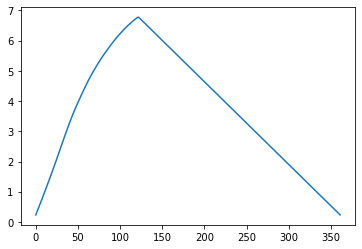
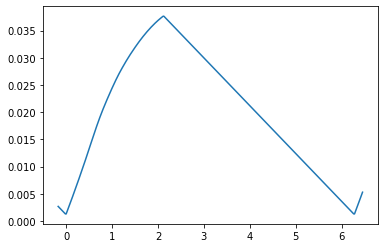
I basically have six graphs; three with rotation angles with respect to the three axes and three with translations. As for the flexion-extension, this is a linear function from 0° to 120° as a given motion, while the others were obtained as outputs.
So, if I understand your answer correctly I don't have to define knee joint, but I have to start from the definition of reaction force, right? Or do I need to define the AnyReacForce together with the RevoluteJoint?
AnyReacForce Knee = {
AnyRefNode &ThighNode = ..Seg.Thigh.KneeJoint;
AnyRefNode &ShankNode = ..Seg.Shank.KneeJoint;
//AnyDrawStdJoint Knee = { };
}; // End of knee
AnyKinEqSimpleDriver KneeFlexion = {
DriverPos = {-120pi/180}{0,0,1};
AnyReacForce &Joint = .Knee;
};
AnyKinEqInterPolDriver KneeAbd = {
T = {0.0 , 0.00833333, 0.01666667, 0.025 , 0.03333333,
...
0.95833333, 0.96666667, 0.975 , 0.98333333, 0.99166667,
1}*Main.Study.tEnd;
Data = {{0.23290907, 0.303203, 0.37384821, 0.44484215, 0.51618176,
...
6.7553693, 6.7758715},0,0}*pi/180;
Type = Bspline;
BsplineOrder = 4;
AnyReacForce &Joint = .Knee;
};
AnyKinEqInterPolDriver KneeRot = {
T = {0.0 , 0.00833333, 0.01666667, 0.025 , 0.03333333,
...
0.95833333, 0.96666667, 0.975 , 0.98333333, 0.99166667,
1}*Main.Study.tEnd;
Data = {0,{-6.5135326, -6.6241747, -6.7315992, -6.8358009, -6.936774,
...
-1.408883, -1.255194, -1.0988564, -0.93985359, -0.77817159},0}*pi/180;
Type = Bspline;
BsplineOrder = 4;
AnyReacForce &Joint = .Knee;
};
AnyKinEqInterPolDriver Xtrasl = {
T = {0.0 , 0.00833333, 0.01666667, 0.025 , 0.03333333,
...
0.95833333, 0.96666667, 0.975 , 0.98333333, 0.99166667,
1}*Main.Study.tEnd;
Data = {{-2.948783, -3.112774, -3.2785592, -3.44613, -3.6154764, -3.7865873, -3.959451,
...
-25.512276, -25.655722, -25.796707, -25.93523, -26.071288, -26.20488, -26.336007, -26.464668, -26.590862, -26.714588},0,0};
Type = Bspline;
BsplineOrder = 4;
AnyReacForce &Joint = .Knee;
};
AnyKinEqInterPolDriver yTrasl = {
T = {0.0 , 0.00833333, 0.01666667, 0.025 , 0.03333333,
...
0.95833333, 0.96666667, 0.975 , 0.98333333, 0.99166667,
1}*Main.Study.tEnd;
Data = {0,{34.227079, 34.241116, 34.254381, 34.266873, 34.278587, 34.28952,
...
28.894067, 28.749905, 28.60389, 28.456032, 28.306341, 28.15483, 28.001508, 27.846386},0};
Type = Bspline;
BsplineOrder = 4;
AnyReacForce &Joint = .Knee;
};
AnyKinEqInterPolDriver zTrasl = {
T = {0.0 , 0.00833333, 0.01666667, 0.025 , 0.03333333,
...
0.95833333, 0.96666667, 0.975 , 0.98333333, 0.99166667,
1}*Main.Study.tEnd;
Data = {0,0,{-1.9686421, -1.7056788, -1.4509027, -1.2043015, -0.96586561, -0.73558467,
...
3.5723669, 3.6666611, 3.7647059, 3.8665014}};
Type = Bspline;
BsplineOrder = 4;
AnyReacForce &Joint = .Knee;
};
That's how I interpreted your answer and edited the jnt.any file, is that what you meant?
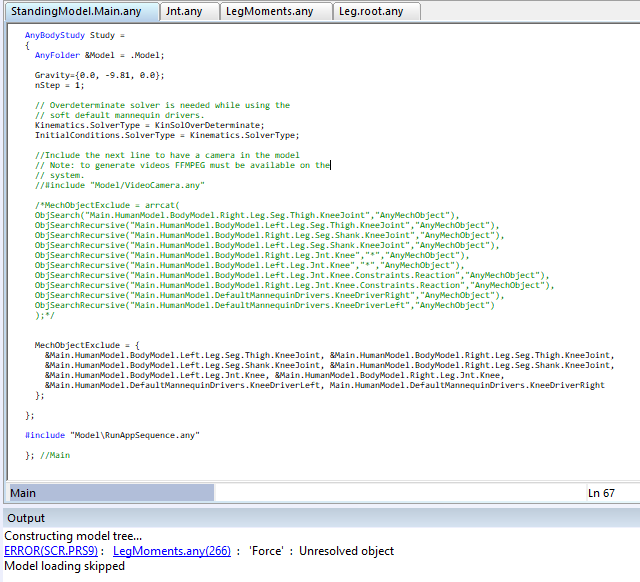
In doing so, however, I get this error, so I don't understand if I can not define the knee as a joint
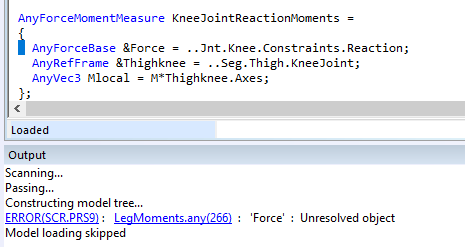
Thank you very much!
Best Regards, Vera