Progressing to solve kinematic optimality conditions and hard constraints.
Progressing to solve kinematic optimality conditions and hard constraints.
Progressing to solve kinematic optimality conditions and hard constraints.
Progressing to solve kinematic optimality conditions and hard constraints.
Failed to solve kinematic optimality conditions and hard constraints after 5 fallback attemps.
Constraint violations for study 'Main.Studies.ParameterIdentification.KinematicStudyForParameterIdentification' :
Constraint #26 is above tolerance 0.1, error = 0.108738, constr. #5 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.SpineRhythmDrv'.
Constraint #38 is above tolerance 0.1, error = 0.107169, constr. #17 in 'Main.HumanModel.BodyModel.Trunk.JointsLumbar.SpineRhythmDrv'.
ERROR(OBJ.MCH.KIN3) : KinematicStudyForParameterIdentification.any(12) : KinematicStudyForParameterIdentification.InitialConditions : Kinematic analysis failed in time step 0 : Position analysis is not completed
I'm a new user so I can not upload attachments.
Best regards.
Hi @Bjorn
Thank you for the reply, I use the TLEM2 model.
I have changed only the markers name and I have removed the upper body, I think the problem is with the initial position but I don't know how to set it right because now I'm using the position of the example.
I haven't the force plate so I can't add external forces.
Did you use the AMMR\Application\MocapExamples\Plug-in-gait_Simple\FullBody_GRFPrediction.main.any or is it a bvh model?
Did you turn of the upperbody with the INCLUDE_UPPERBODY statement?
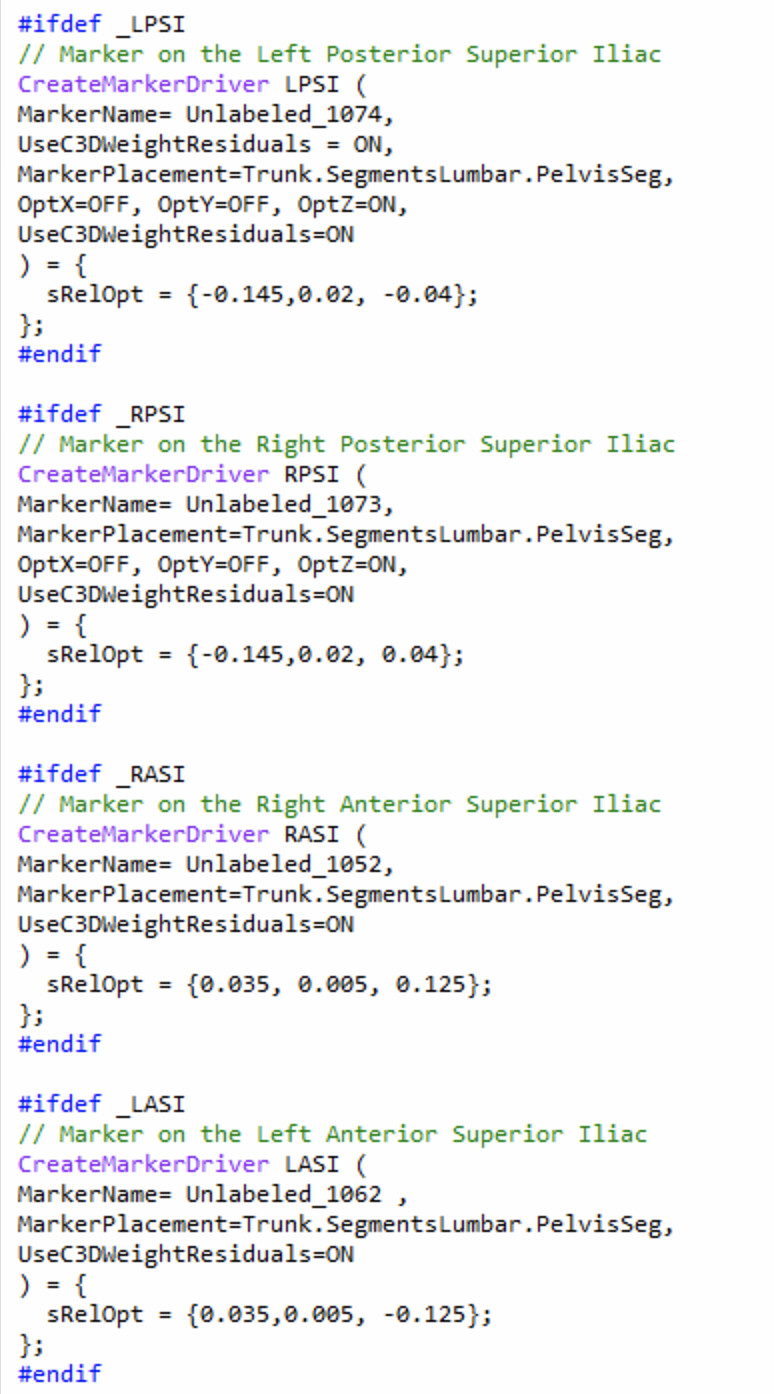
How did you rename the markers ? in the MarkerProtocol.any file?
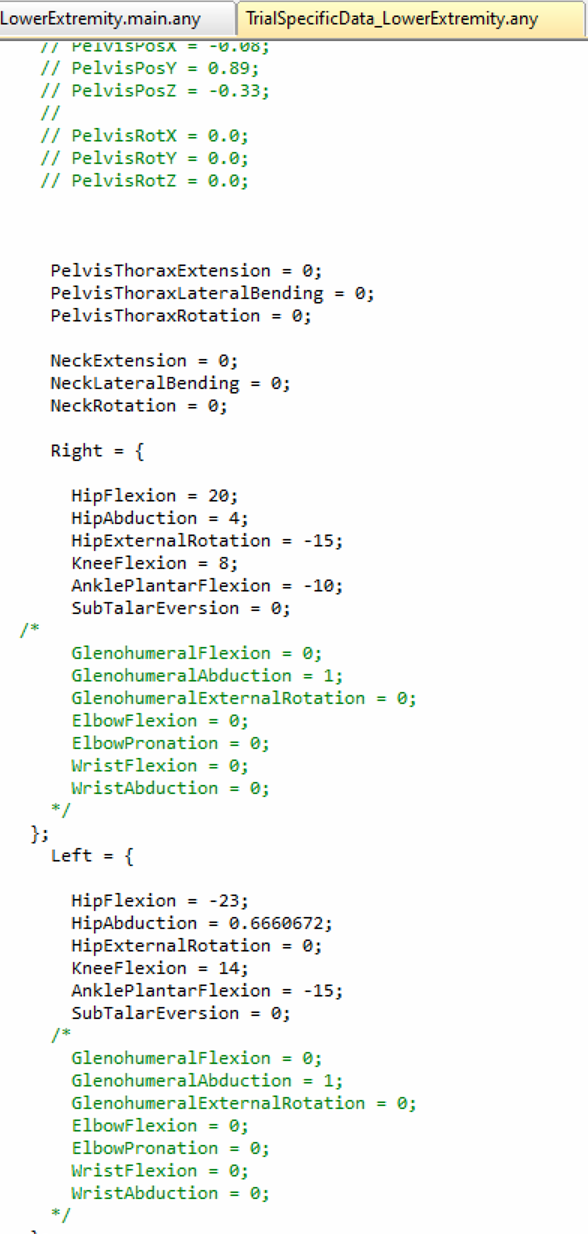
You can set the initial posture of the model in the TrialSpecificData.any file
I use AMMR\Application\MocapExamples\Plug-in-gait_Simple\LowerExtremity.main.any.
I renamed the markers with the name they have in the software used for the capture.
Yes, I know where I can set the initial posture but I don't understand where to find the right values to enter
If you don't have any force plates you need to explicitly enable the GRF prediction by adding #define USE_GRF_PREDICTION ON in your model. otherwise you are probably missing something to balance the model.
The initial position is adjusted manually to be closer to your c3d file. You just try to adjust the values based on the loaded position of the c3d file.
Hi @Bjorn,
Now I have tried AMMR\Application\MocapExamples\Plug-in-gait_Simple\FullBody_GRFPrediction.main.any and I put USE_GRF_PREDICTION ON but it still doesn't work and I have also modified the initial position.
This is the google drive link to the file:
I really appreciate if anyone could help me.
Best regards.
Riccardo
The c3d file you are trying to load does not have any of the expected marker names.
Your markers are named Unlabeled_<number> whereas the anybody model expect a standard marker protocol defined in the MarkerProtocol.any file.
You will have to rename the markers in the model to match the naming from your file.
Great that you already did that!
After a second look it seems your c3d file is in meters while the model expects milimeters.
In the C3DSettings.any file there is a PointsScaleFactor which you can set to 1. that seem to do the trick in the model you send me.
Hi @Bjorn,
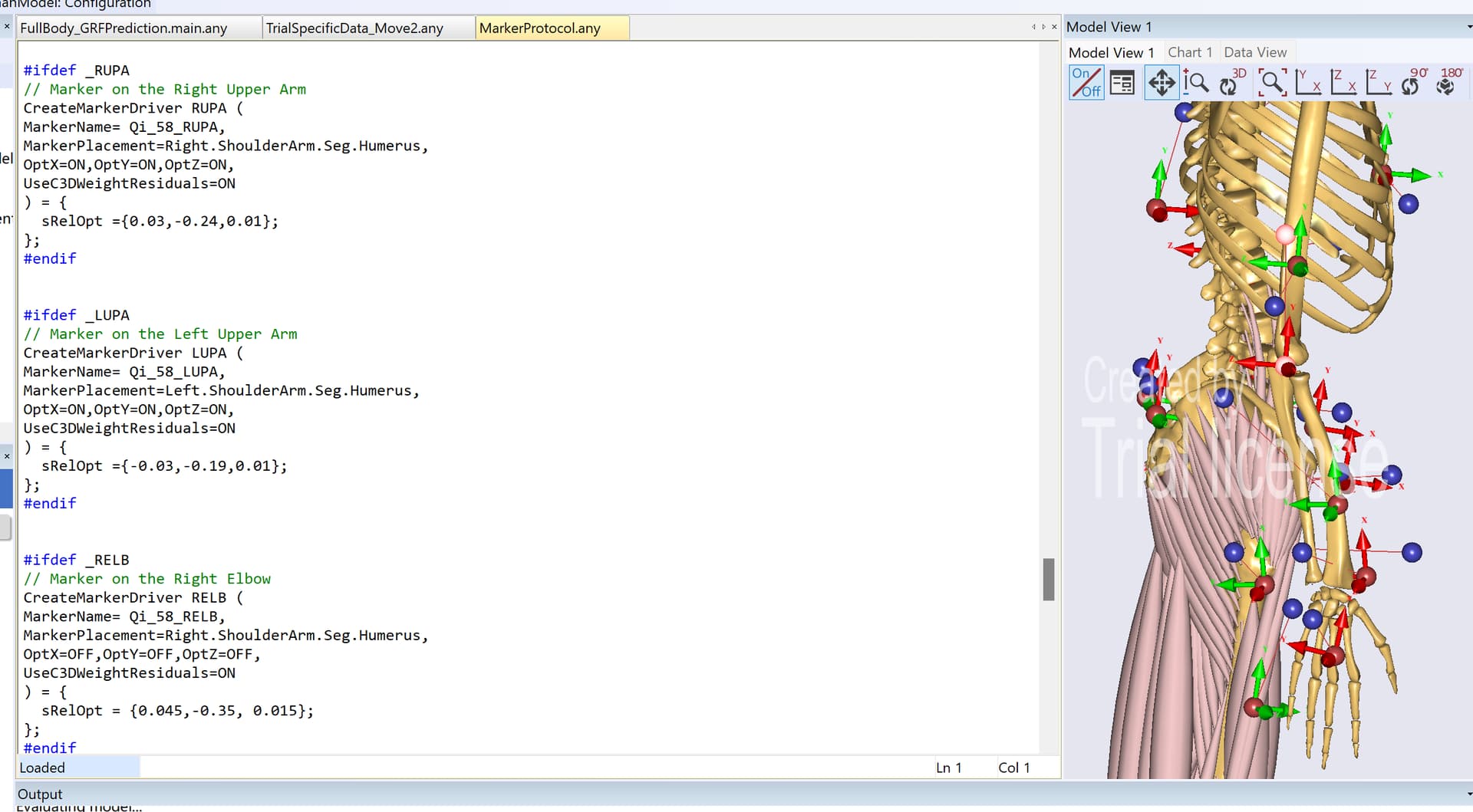
I also got the same problem. I am sure I got the right starting position. But the RUPA and UELB has swapped. Do you know how to swapped them back and how I can solve this problem?
Good, now at the line that says MarkerName = Qi_S8_RUPA that tells the CreateMarkerDriver class to use the Qi_S8_RUPA data in the c3d file to construct the models _RUPA marker.
If you put Qi_S8_RELB instead and do the opposite for the _RELB then you will effectivly "Swap" those to markers.