Hello,
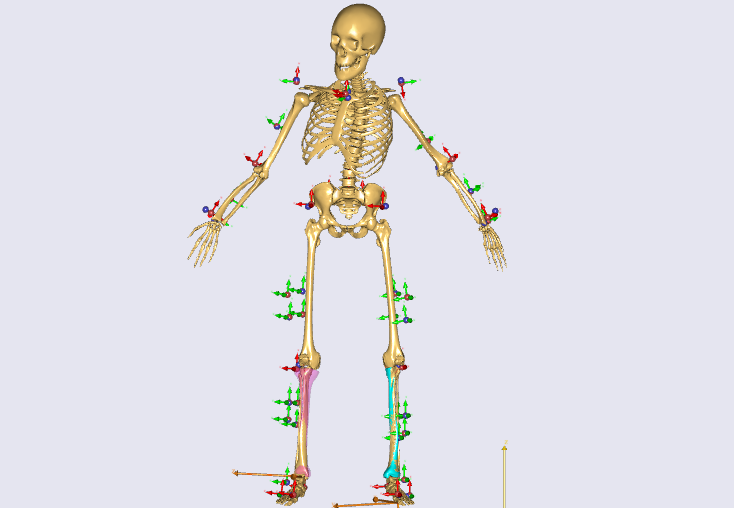
This is the 2nd part of my questions on the MoCap model optimization process. I am doing the optimization in two steps: 1. Lower-body with torso, 2. Upper-body.
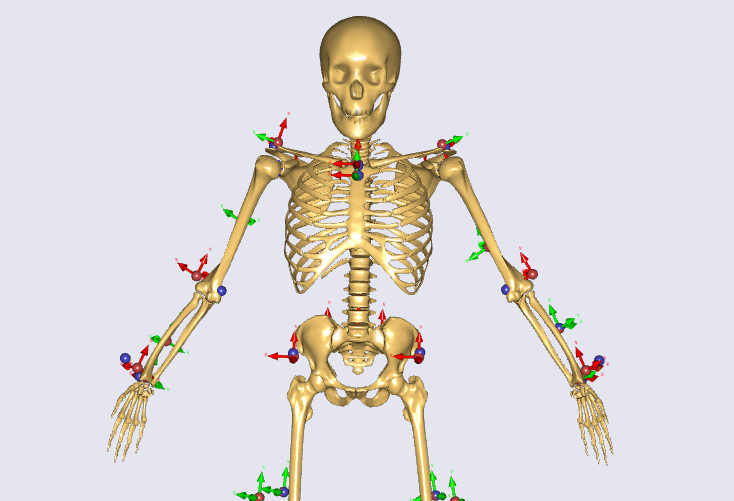
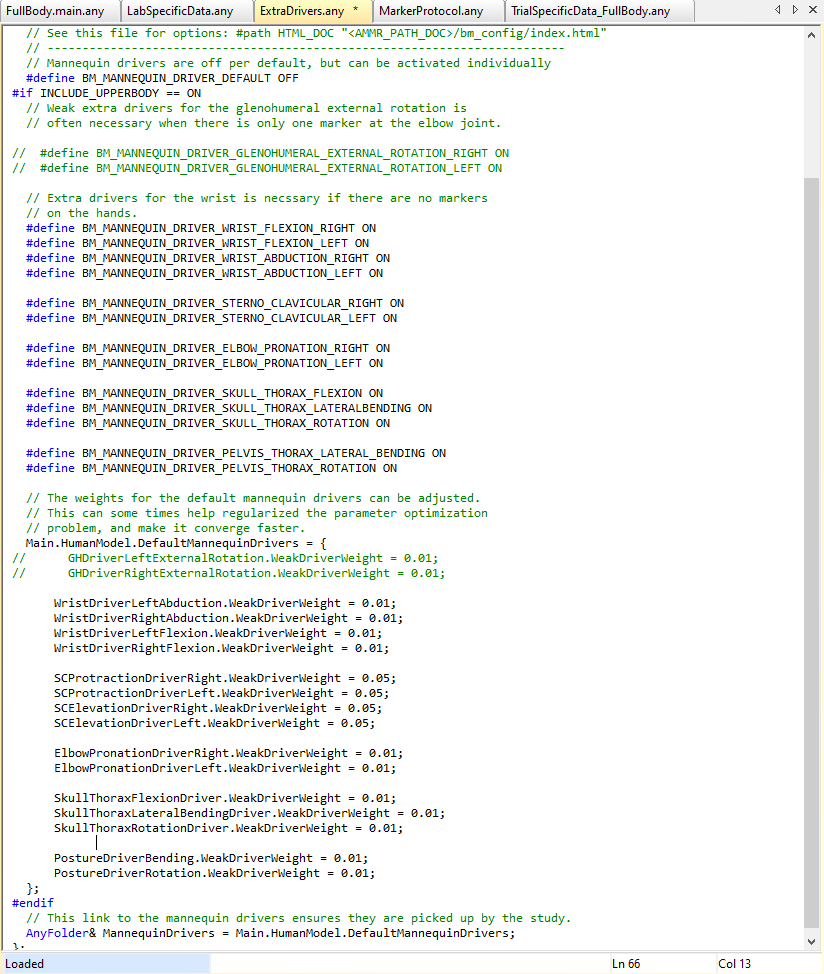
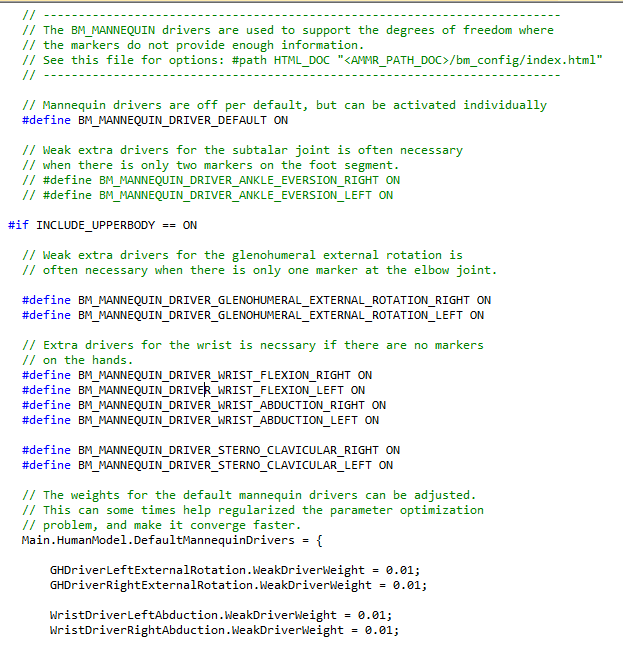
Upper-body: After completing the lower-body optimization (with torso only), I loaded the modified values from lower-body optimization and ran the upper-body optimization. Since I don't have markers on the hand, only one marker on elbow, and only two markers on torso (STRN and CLAV), I have turned on the following soft (extra) drivers to guide the upper-body optimization: gleno-humeral external rotation, wrist flexion, wrist abduction, and sterno-clavicular for both right and left side. Please see the picture (2) attached here.
(a) I have also turned on the BM_MANNEQUIN_DRIVER_DEFAULT driver. I’ve seen that it accelerates the optimization process (RunParameterIdentification). But, I am not completely sure how it affects the entire optimization process. Could you please provide me more information on this?
(b) I haven't used a driver weight for sterno-clavicular soft driver. I am wondering how the driver weight might affect the overall optimization process? I have tried to use a weight (0.05) for this. I haven't noticed any effect of this weight for some reason.
For upper-body optimization, initially I used the same markers and directions used in the marker protocol from "Plug-in-gait_Simple" to guide the RunParameterIdentification (optimization). It failed with the following error:
Failed to resolve kinematic constraints. Newton relaxation too small. (final kin. error = 2.897911E-04)Constraint no. 6639 above error tolerance 0.000100, error = 0.0001179481072.
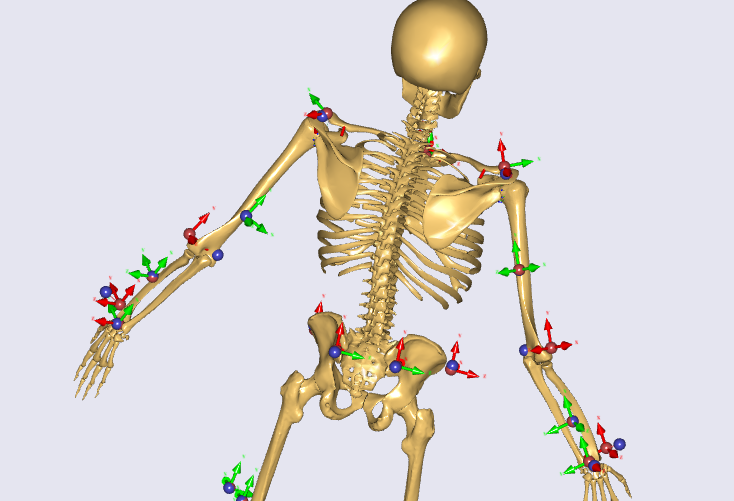
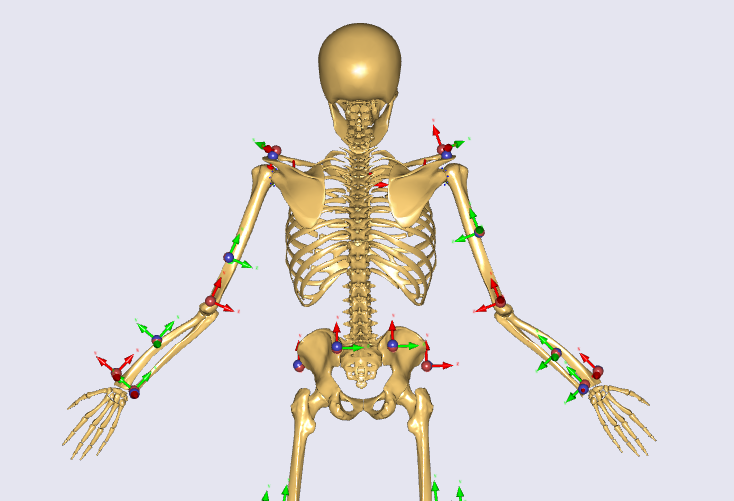
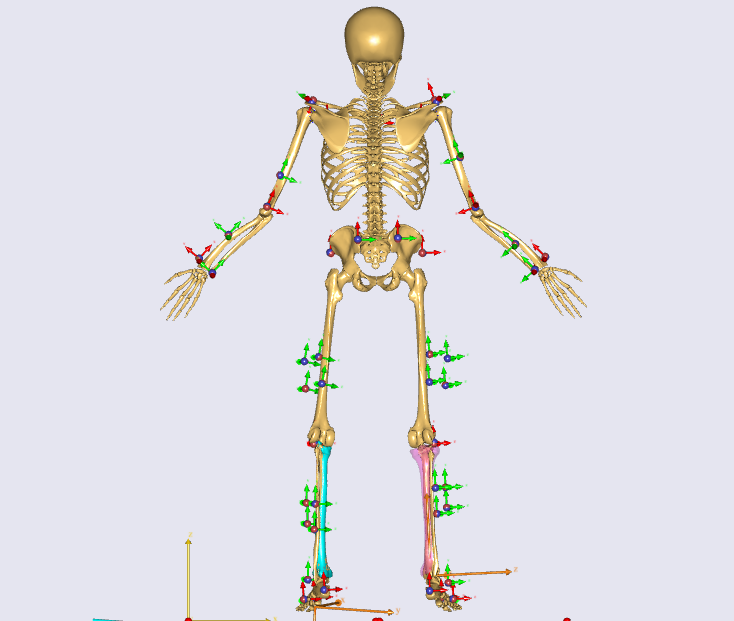
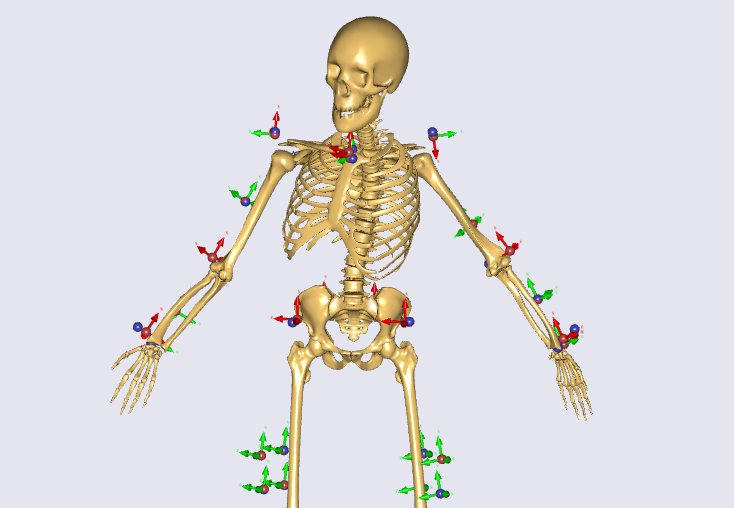
The initial AnyBody model marker locations for the shoulder markers (RSHO & LSHO) obtained from the marker protocol didn’t look correct. So, I adjusted it manually to a most realistic location for shoulder markers and my optimization worked (completed till the end). However, the optimization doesn't look good for certain markers in the upper-body. Please see the pictures (2 & 3) to see the issues with certain markers. For example, the AnyBody and Experimental marker pairs on elbow don't overlap. Wrist marker pairs are also not overlapping. In addition, the torso is also twisted in this case.

(c) What can I do in this situation to improve my MoCap model optimization for upper-body?
(d) I can add more markers to participate in the optimization process, for example: the elbow markers. In this case, marker pairs match, but they go quite far from the body which seems to be unrealistic.
(e) I have tried to use the X and Z directions in the RWRB and LWRB markers for optimization, which has given me the best optimization result so far by visual inspection. However, the wrist and elbow marker pairs still don't overlap and it still has issues.
I am not sure about the appropriate process to follow in these cases and optimize (personalize) my model correctly. I would highly appreciate your feedback. Thanks very much.