Hi Soren,
Thank you for your feedback. This is very helpful.
Hand length optimization is turned off. Here from this optimization (first 3 pictures in the previous comment), we can see larger distance between experimental and AnyBody marker in the elbow and wrist, which I assume to be higher error in optimization? Please correct me if I am wrong.
But when the GHD external rotation soft driver (gleno-humeral) is turned off and I used elbow pronation driver only (wrist flexion & abduction, sterno-clavicular, skull-thorax and pelvis thorax drivers are used on both occasions), it provides me better overlap between marker pairs (last picture in previous comment). I understand these markers are for visual purpose, but center-to-center distance is also low here. Initially, I started using the GHD External rotation driver since I have only one marker on elbow and this driver prevents the twisting in the elbow (joint).
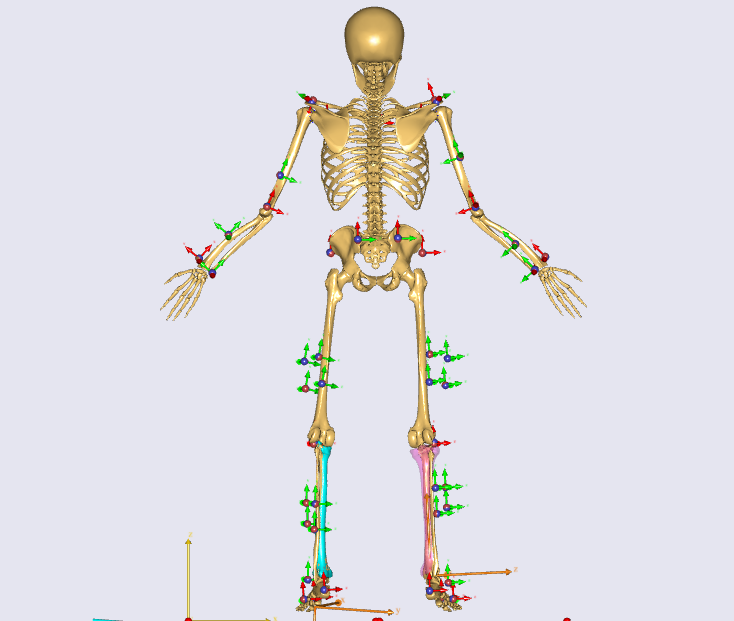
Here I tried to asses the optimization from a visual perspective. How can I assess the quality of the optimization? Visually, I assessed this by looking at the distance between marker pairs (how well the experimental and AnyBody markers align). But, it there a certain threshold value I should look at after running the optimization? I mean, the error value (pos) to be below this threshold value.
Please see the pictures below that shows my current extra driver set up and my latest optimization.
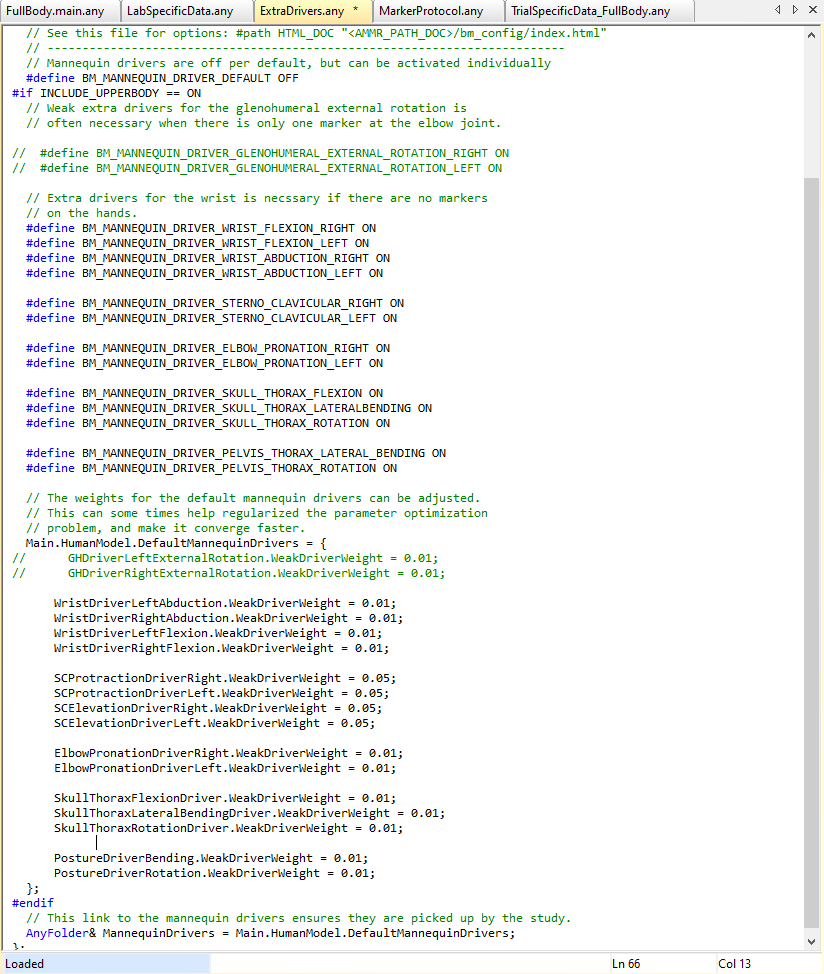

Finally, after I run the marker tracking and the inverse dynamics, is there any threshold error value for marker pairs that can be used to assess the accuracy/validation of the model/simulation?
Thank you for your time and consideration. Have a great day!
Best Regards,
Arif