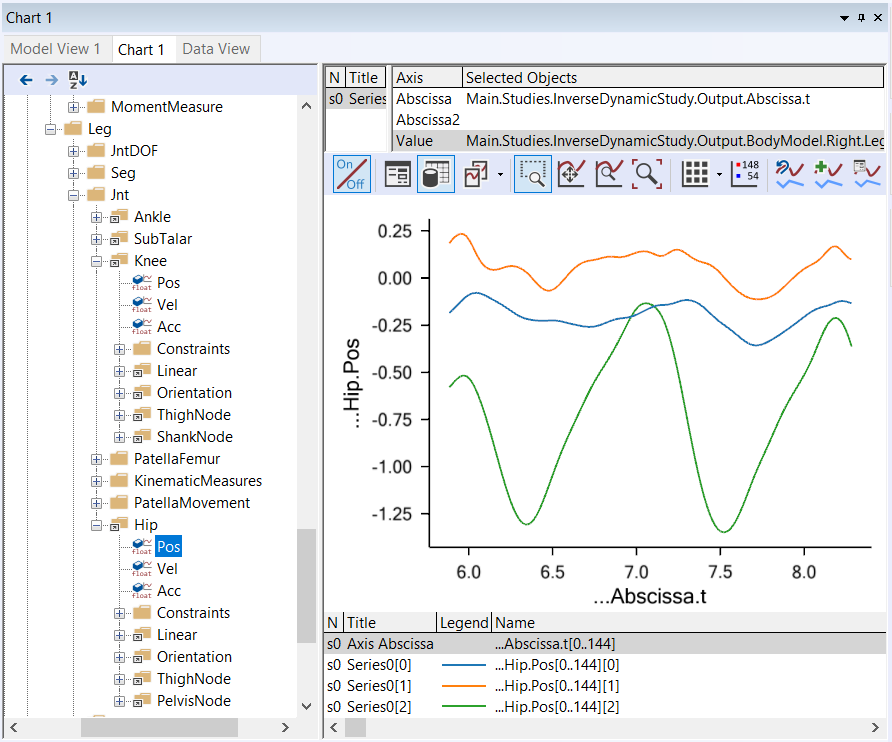
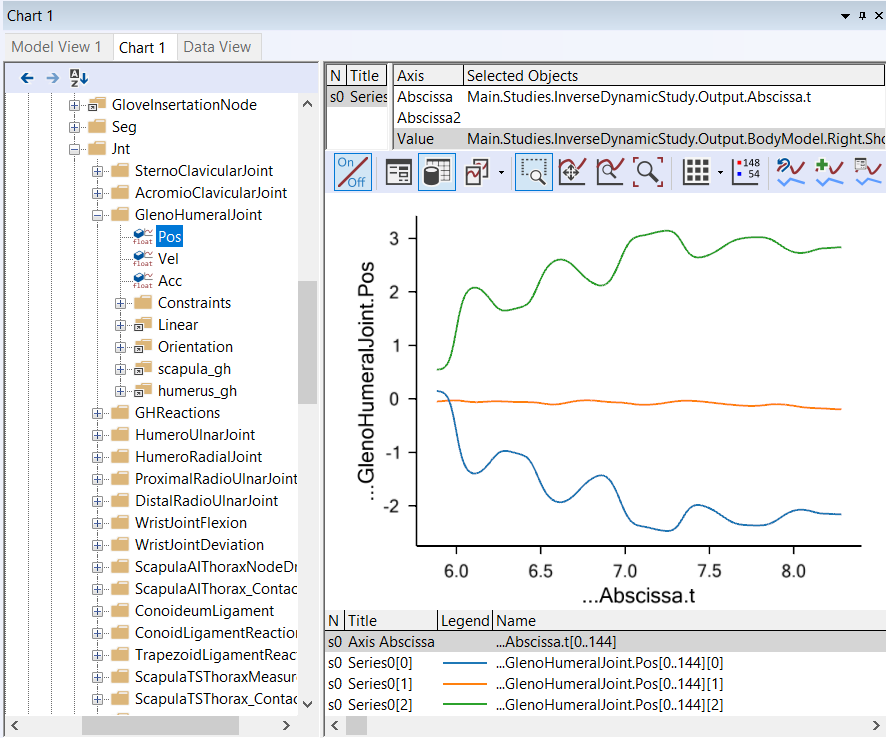
I am trying to understand the output position charts of the shoulder and hip joints. As shown in the attached images, there are three position lines plotted in the same graph. I appreciate any advices to clarify the followings.
Are these lines represent flexion, adduction and rotation? If so, how can I identify them separately?
Is the units in radians?
Is the units of joint velocity graphs in rad/s?
Also, I would like to know the units of the muscle force charts.
If you would like to know about joint angles, then I would recommend using the values from BodyModel.MannequinValuesFromModel (in degrees) or BodyModel.Interface (in radians) folders. These are already separated as per the functional angle.
The output units in AnyBody follow the SI units. However, sometimes it's possible that new outputs are defined in the model code and they are different from SI units. E.g, Mannequin values are in degrees and degrees/s. I can't think of any other example right now where the units do not follow the SI system.
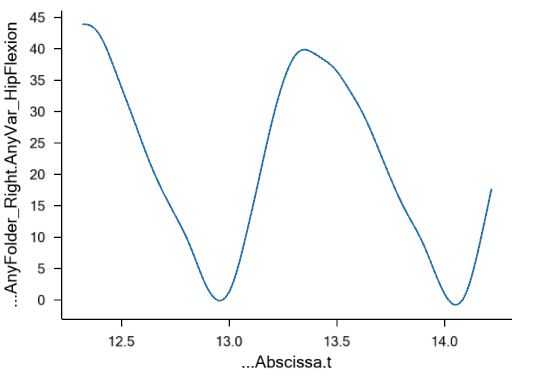
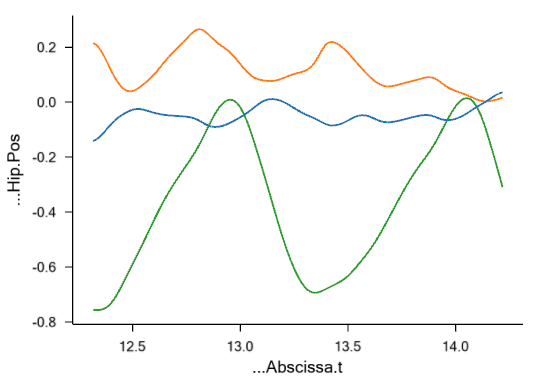
The Hip position graph obtained from BodyModel.MannequinValuesFromModel folder (attached image 1) has a different shape(seems like inverted?), compared to the hip position graph from BodyModel.Right.Leg.Jnt.Hip (attached image 2- green line). What is the reason for this?
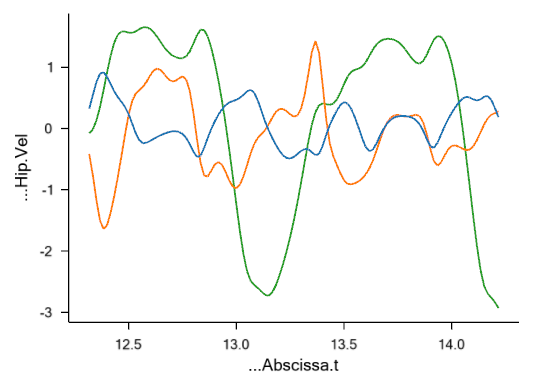
I want to obtain the Hip velocity as well. The only place I could find for this is BodyModel.Right.Leg.Jnt.Hip.vel, and the graph looks like the attached image 3. How to identify there three lines separately?
3.If I want to represent Hip position and velocity graphs side by side, which combination is correct?
Here are some answers:
1)
The MannequinValuesFromModel is using a different measure than in the hip joint itself the location of the coordinate systems are the same but it has been rotated. This allows having symmetric values right/left. If you want the rotations to be measured differently you can easily create a new AnyKinRotational for this.
please have a look at the interface folder e.g. Main.HumanModel.BodyModel.Interface.Right it has the directions separated, and has velocities.
3: Then i would use the values in the interface folder.
Just one last question in this regard, does the Main.HumanModel.BodyModel.Interface values in the same phase as the Selected Output folder values?
In other words, if I show the knee angle graph from the Main.HumanModel.BodyModel.Interface folder and corresponding knee flexion torque from the Selected Output folder, is that correct?