I'm brandnew with your professional software and trying to get familiar with all the environments. By doing some first analysis of a sit to stand motion by means of inputting drivers, I found some hurdles – or rather some challenges I’m trying to figure the solution out.
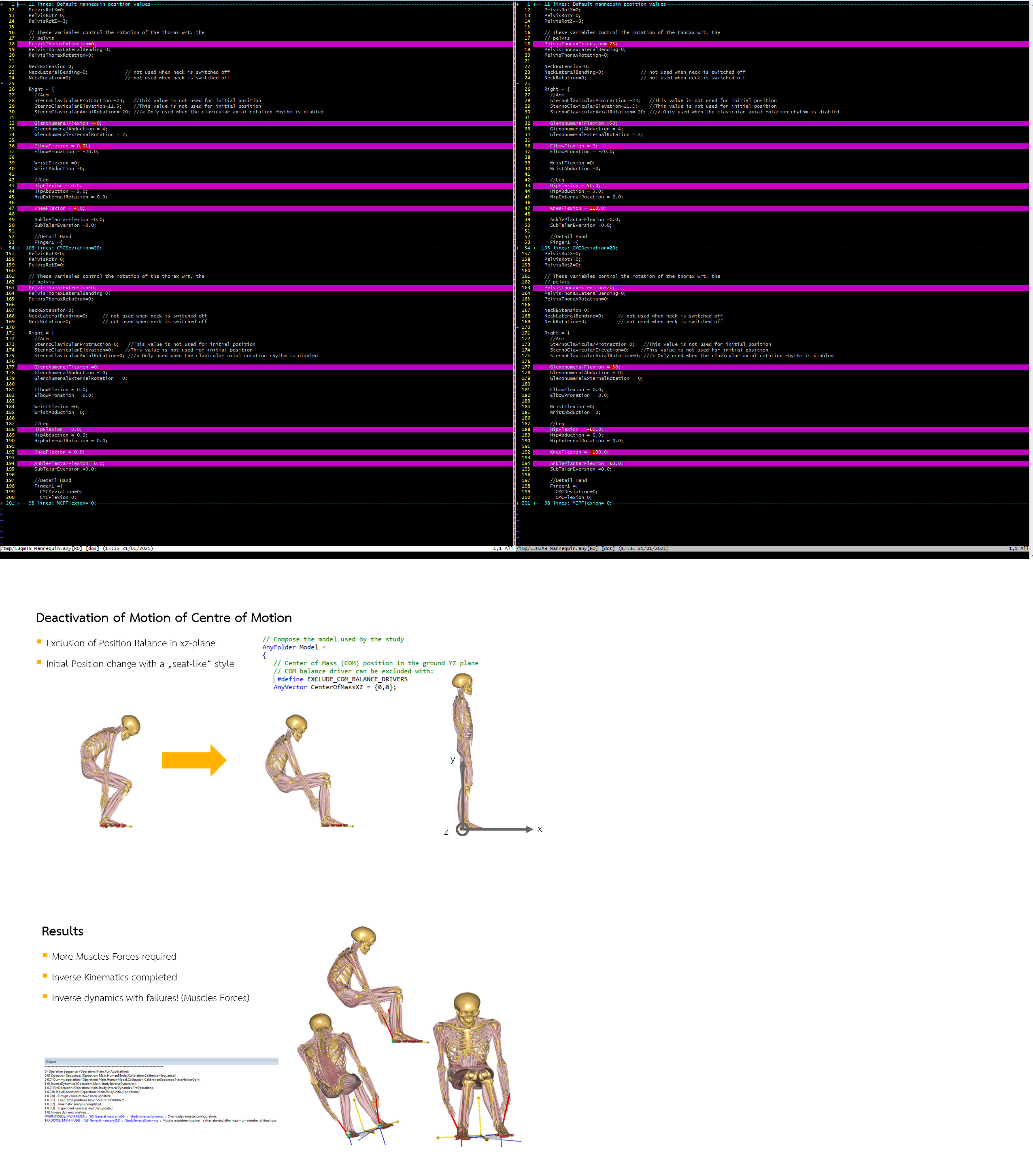
1.) Based on the template HUMAN STANDING, I customized the parameters in the mannequin-file in order to get the Seat-off Position as my initial motion. But it does not result in a reasonable result. Rather it would look like a squat position. By activating the switch #define EXCLUDE_COM_BALANCE_DRIVERS, the model results somehow in the seat off position, but the inverse dynamics suggest a warning of overloaded muscles force and the simulation could not go on any further. Could you please help me out, how would I be able to get the seat off position, for example the thighs almost horizontal? Here is the snapshot of the changed parameters in the mannequin file comparing to the original settings in the left side (section I in the figure).
And the graphical presentation of initial positions by activating the EXCLUDE_COM_BALANCE_DRIVERS is shown in the section II in the figure.
The resulting failure-output is shown in the section III in the figure.
2.) By giving some Velocity parameters in the mannequin file, it indeed results in a stand position, but that wouldn‘t be the correct way to do it, I suppose. These parameters are assume to be linear and constant over time. (Sloppy parameters so that the all angles return to Standing-Motion within simulation time within 1 s., see the first figure) However, literally the velocity parameters at each joints consist of different stages, i.e. acceleration and deceleration phases. By doing some manual searching, I found that the possible driver would be the AnyKinEqInterPolDriver ,as I have those velocities parameters as function of time and could use those as look-up tables. However, I could not figure out how I could use this in my model. Could you please help me with this?
Many thanks for your kind Assistance
I think the problem is that the model is lacking support in the seated position. Using the CoM driver you ensure that the model can be in balance, but when removing it you end up having a model with the CoM behind the feet, and since there is no support from a chair in the model it will struggle to solve the for the balance and the inverse dynamics eventually fails. The reason why the inverse dynamics works some of the way that there are some residual force available in the model, but when they become too big it will fail.
If you want the model to start for a seated position you will need to add some support that allows the model to be in balance, alternatively it is possible you obtain a balance by allowing the arms to be held out in front of the subject to counteract and help bring forward the CoM.
For the use of interpolation functions as a driver of a joint please see e.g. the FreePosture models in the AMMR see the "FreePostureFullBodyMove.Main" file, it is driven by interpolation functions.
thank you very much for your answer. I've looked into the example of Interpolation. In the example, the B-Spline was used. And according to the AnyBody-Documentation, there are some further types available. However, I found out that there is no interpolation type, which guarantee following conditions at the same time:
the passing through the given data points, as the splines take those points as control points (Bezier and B-Spline)
continuous differentiability (piecewise linear)
In some previous forums, there were some discussion about that. However, I cannot find any conclusion, which interpolation with both requirements could be used or any other techniques. For the first one for example, the data is strongly depend on the control points, which the interpolated curve can also be far from the control points. In some literature, I found that cubic spline (not cubic B-Spline) achieve both conditions. (?), but there is no possibilility of this in the program.
Do you have any suggestion which help me out with the interpolation type in AnyBody with these requirements?