Could you specify what version of AMS/AMMR you are using? The error looks strange - if it not due to post-processing, then it might be due to muscles somehow losing strength for certain timesteps? Do you use 3-element muscles or simple ones? It could also indicate wrapping problems, but it is hard to say without looking at the model.
It may or may not help. If you can manage to do it - parameter identification should improve the kinematics, which in turn may help with the muscles. But how necessary are the Hill muscles for your work? Could you try running without them and see what happens?
I changed to set a simple model then, the error was fixed.
Thank you for your advice, it was very helpful.
By the way,
I'm planning to do shoulder modeling for validation, compared to other literature.
But other researches have reported using the Hill-type model.
So, in my opinion, it may be a weakness if I just set the simple model.
However, I haven't fully understood what the simple model is.
I know that the simple model only required isometric strength. But how the simple models moderate contraction velocities and small joint angle variations?
Could we come back to you next week regarding the 3E element muscles? Could you share your trial where it fails? We could then have a look here at what goes wrong and how to fix it.
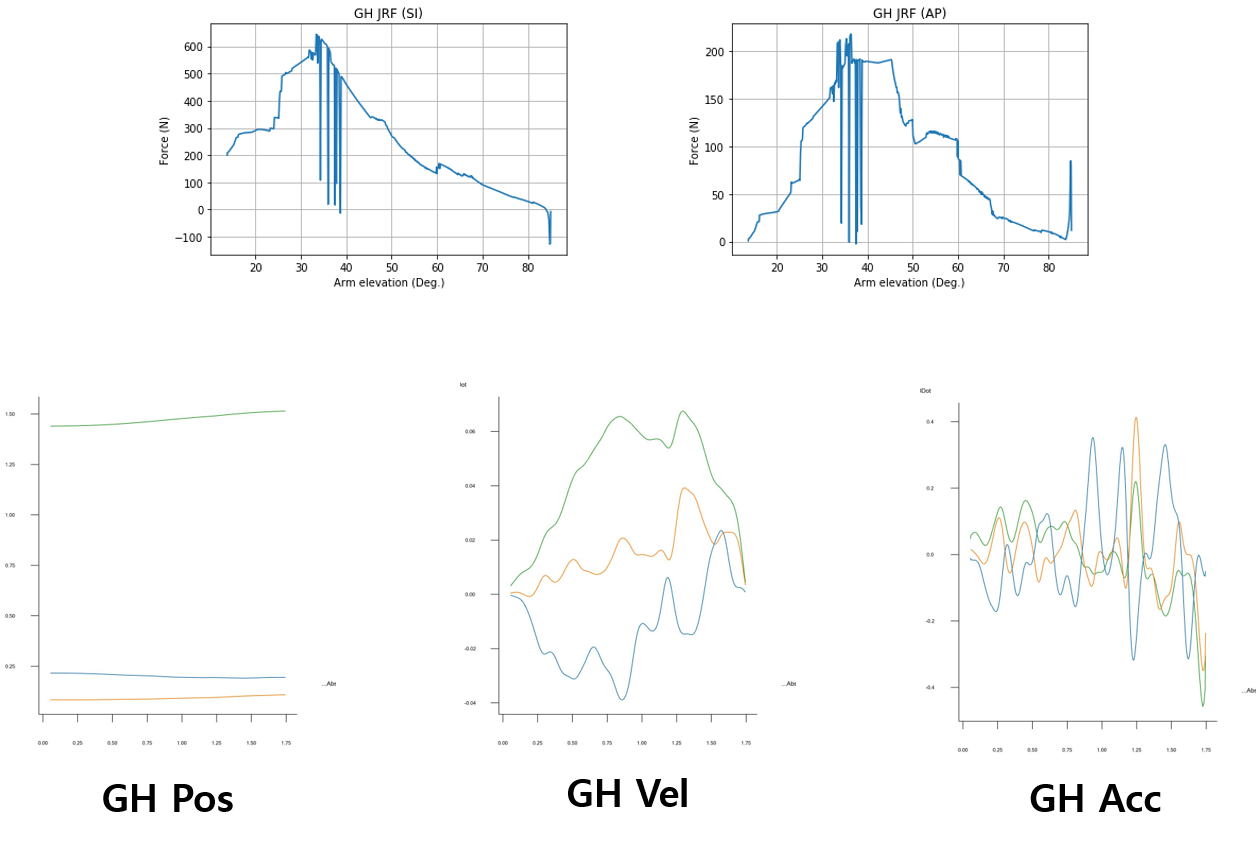
The 3E muscle indeed takes contraction dynamics into account for defining the strength at a particular time step, but it also makes it more demanding on input parameters and proper calibration. Right now I am not 100% sure what the problem is - it could be a few things.
Muscle forces are subject to muscle recruitment optimization, please see here
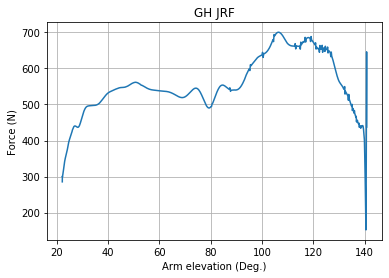
The problem with my model was doing the wrong calibration.
Here is my new result,
I followed your advice, then the error is well fixed.
Maybe the error at 140 deg. would be setting of c3d frame problem (needed more extra frame for calculation). I guess it can be fixed if I do the pre-processing of my data again.
By the way,
I have another question,
Our lab coordinate system is different from that of the default MoCap model.
I know this problem can be fixed by modifying the 'Z' axis and auto-detection of the force plate.
But, my model designed that remove the lower-limb and force plate, because it is for shoulder motion specifically.
If the coordinate system is different, the force plate is necessary?