Dear seniors,
I am trying to bind my exoskeleton model to the HumanModel, and after researching many posts on forum, I have achieved some results. Here is my work.
Exo_Human.zip (3.8 MB)
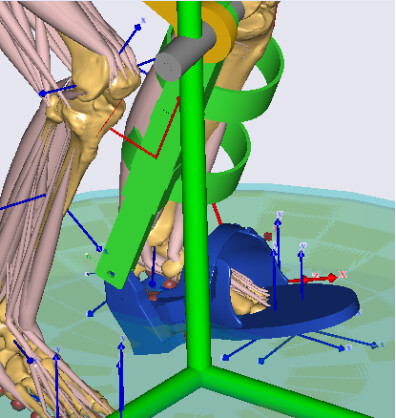
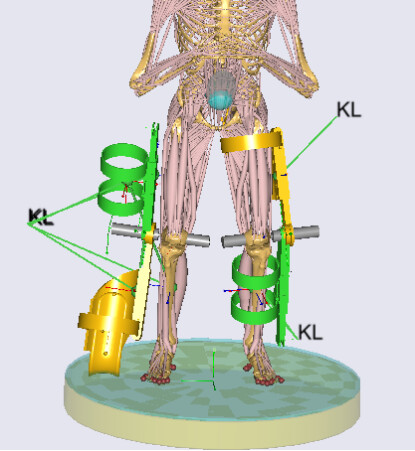
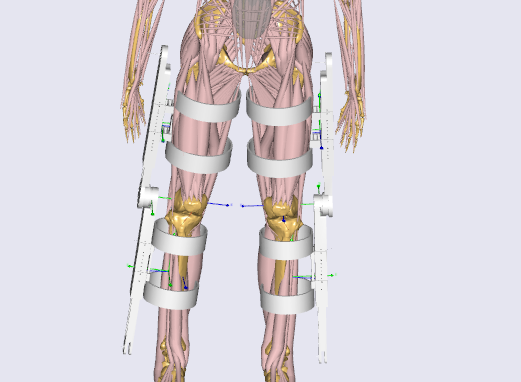
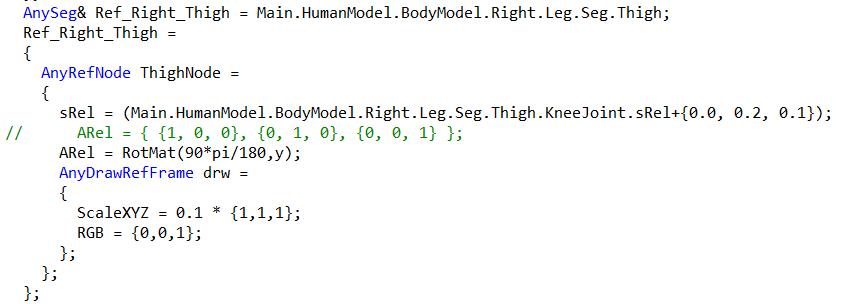
At first, I imported my whole exoskeleton into Anybody, but in the end, I found it a bit difficult. Now my exoskeleton model only retains the both thighs, shanks, and knees. I use AnyCylindricalJoint to connect the exoskeleton kneejoints with the human model kneejoints. Nodes were created on the thighs and shanks of Exo-model and HumanModel, and constraints were implemented using AnyKinEq: the x-axis and z-axis were constrained at the thighs, and the x-axis was constrained at the shanks. Perhaps due to the lack of strict correspondence between the thigh and shank nodes on the exoskeleton and human model, the position of the exoskeleton in the completed kinematic analysis model may be slightly tilted.
My thigh and shank nodes are determined based on the corresponding kneejoint node position coordinates, but postures of their kneejoints are different, that should be the reason why the thigh and shank nodes cannot be strictly matched. I don't know if my understanding is correct.
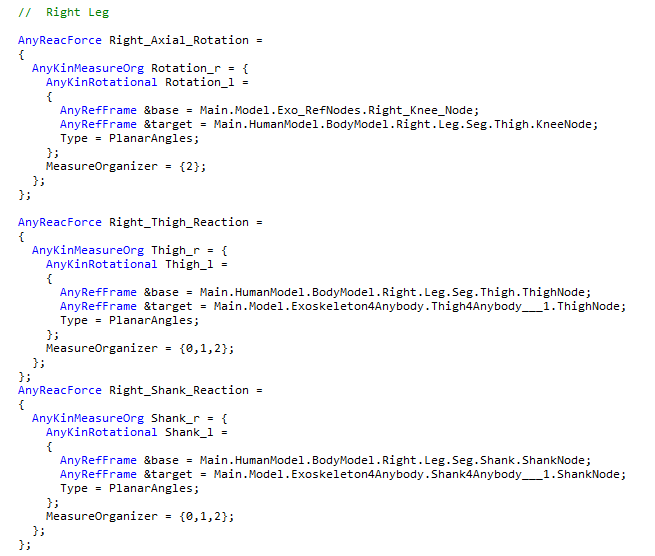
The trouble is with my inverse dynamics analysis. Based on what I have seen in other posts, the added constraints need to be balanced by adding reactions. My single leg has a thigh and a shank, introducing 12 degrees of freedom. In the kinematic section above, I added additional 7 constraints for each leg, so theoretically, I should add 7 additional reactions. I added 7 reactions using AnyReacForce for single leg and set the Constraints.Reaction.Type of AnyCylindricalJoint to {Off, Off, Off, Off}.
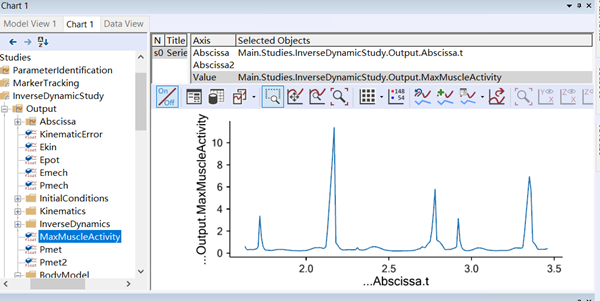
Unfortunately, after running the inverse dynamics analysis, it showed redundant constraints and displayed "Muscle recruitment solver : solver aborted due to singular KKT matrix
".

This is beyond my ability, and I hope someone can help me solve this problem ![]() .
.
Best Regards
Meng