Hi everyone,
I'm trying to explore the effect of hip exo's weight distribution on human kinetic. I have driven the coupled human-exo model successfully based on the collected marker motion data and GRF of human walking without exo. But there are some issues that confused me.
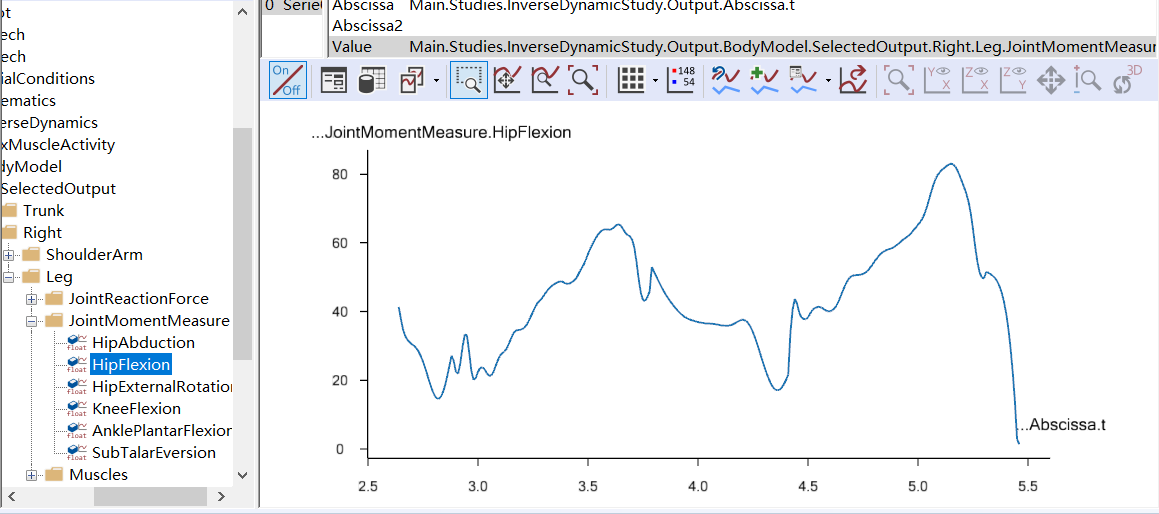
- First, about the Reaction.Type setting of Human-exo connection. I switched the Type Off for kinetic analysis, and created CreateAnyGeneralForce6DOF for all connection. But the hip joint flexor moment was smaller with exo than without it while no external assisted joint moment was added. It's contrary to common sense.
AnyFolder LeftThighConnection =
{
CreateAnyGeneralForce6DOF Lthigh_Forces(
TargetFrame = Main.EnvironmentModel.exo.LeftThigh___1.thigh_connect,
BaseFrame =Main.HumanModel.BodyModel.Left.Leg.Seg.Thigh.LeftThighConnectNode)=
{
strength_Fx = 1000;
strength_Fy = 1000;
strength_Fz = 1000;
strength_Mx = 1000 ;
strength_My = 1000 ;
strength_Mz = 1000 ;
};
};
With Exo:

No exo:
- Next, I'm not sure whether it's reasonable to drive the coupled model with same GRF. Is using predictedGRF with same marker motion data more suitable for this project?
Thank you in advance.
Best regards,
Felix