The webinar on 'Simulation-Driven Conceptual Design of Exoskeletons' describes the usage of ideal assistance for design purposes using a code segment like the one shown below.
Is any equation or other explanation to understand how these ideal motors provide (determine) all the required assistance to the selected DOF of the joint during the simulation.
The most comprehensive theory can be found in some of the papers describing the mathematics behind AnyBody Modeling System. I would suggest you this paper:
Damsgaard M, Rasmussen J, Christensen ST, Surma E, de Zee M, (2006), "Analysis of musculoskeletal systems in the AnyBody Modeling System". Simulation Modelling Practice and Theory, vol. 14, pp. 1100-1111.
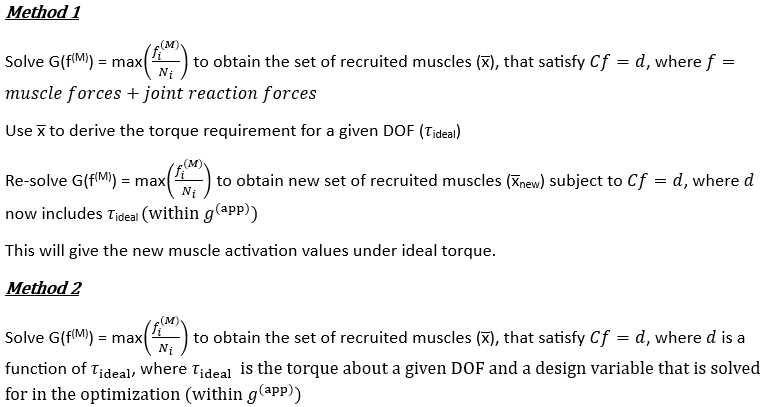
Thank you for providing the references. After looking at the documents you provided, we thought of two ways that the ideal torque can be possibly explained, as shown below.
Let me try an explanation in words. AnyBody basically computes the internal forces in the body to balance external loads and dynamics. These internal forces get split into two groups:
Muscle forces
Joint reactions
The first step to understanding is to make sure that you accept that the system will give you these forces as output when you run the analysis.
The second step is to notice that only the first set, the muscle forces, are minimized, because they carry a cost in the optimization problem that is being solved. The second set, the joint reactions, are costless and will therefore have the value that is maximally beneficial for the muscles.
When you define something to be an AnyReacForce in the model, then the item will belong to the second category. This means that this force will be calculated but not minimized. Instead, at every time of the motion, it will take the value that is the most beneficial for minimizing the muscle forces. Therefore, when you look at the resulting values after the analysis, these values will represent the optimum support a motor placed at the location of the AnyReacForce could possibly provide to support the muscle actions in the whole body.