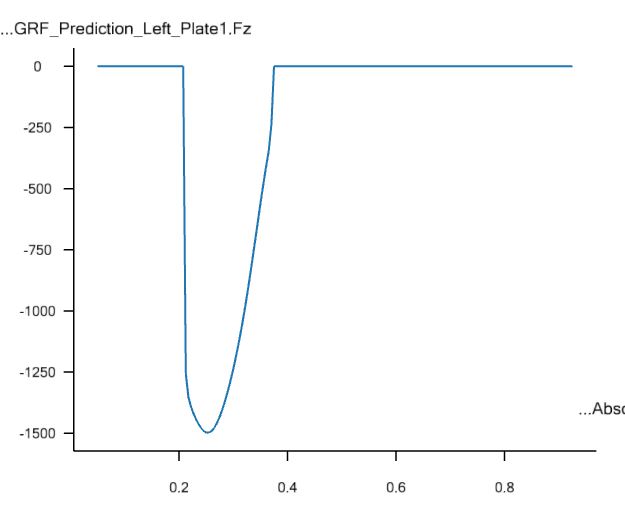
In some of the simulations(person running) we are conducting we are asking the software for a lower tolerance, i.e. changing the tolerance from 1e-3 to 1e-6. I was able to get the study to converge after making a few changes to the Srel vector around the markers on the foot. However, the results from this show a sharp dip in the GRF force (Fig1), which is different to what was measured in the experiment. Is it possible that asking for a lower tolerance may hamper the simulation instead of improving it?
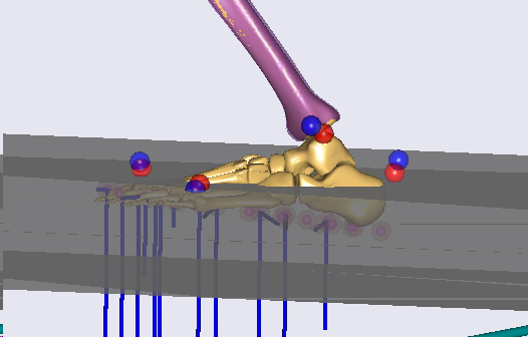
Another observation was that in some cases, the person appears to penetrate the force plate(Fig 2) and turning the optimization at the foot markers as ON leads to the person floating and a zero GRF in some simulations. Is setting all markers close to the experimental marker using the Srel option not a good idea?
For the feet penertrating the plate it looks like your markes are to high on the foot segment.
Alternatively your force plate could be positioned to high in the global coordinate system, or the dimensions are off. Please see my answers to some of your other posts, you might have moved the model markers to much or incorrectly?
As to this:
Is setting all markers close to the experimental marker using the Srel option not a good idea?
The idea is that the blue model markers are placed on well defined bony landmarks or commonly used places for motion capture. When you provide your data and marker protocol you must decide if those landmarks are corresponding to the landmarks you used in your experiment.
If not then you move the blue model markers so they are placed on those landmarks you used in your experiment.
The optimization process then scales the model to fit the experimental markers you have.