I'm trying to predict GRF for standing and squatting. The FullBody_GRFPrediction script in Plug-in-gait_Simple folder under MocapExamples was used for the analysis along with the attached C3D data (new standing both legs 10F) file. new standing both legs 10F.zip (5.0 KB)
The following changes were done to the original scripts.
According to the C3D data the gravity direction and the force plate orientation were modified.
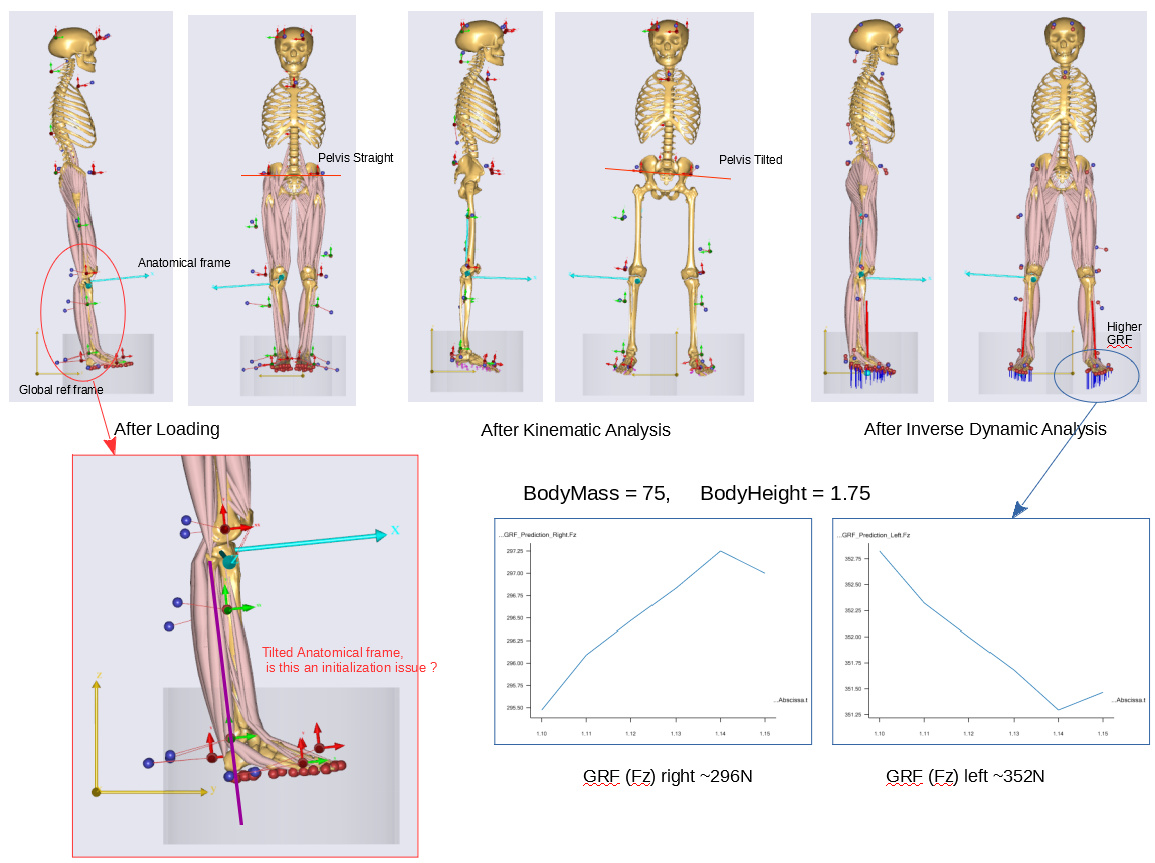
We expected the predicted GRF for both left and right to be similar. However, there is significant deviation (356N vs 296N respectively). What is the probable reason and how to rectify the issue?
Furthermore,
After loading we noticed a tilt of the Anatomical frame, is this an initialization issue? how to correct this?
During Kinematic analysis the pelvis seems to tilt, what caused this issue?
If the model is driven by C3D data there is not sure the model will be absolute symmetric in the GRF, secondly you have excluded the arms, which would also have contributed to the GRF and the might have counteracted a bit this is unknow.
when loading a model the kinematics is not resolved yet, the load position just depends on the values set for the joints and pelvis position in the trial specific file. So do not judge anything on the model in this state this should be done after the kinematics is done.
If the pelvis is tilted in the kinematics this is the given by the markers, are the markers on pelvis placed symmetrically? and do they have large error.
Thank you very much for your feedback. I'm also working with Sanka on the same project.
Regarding the pelvis tilt, yes, the C3D markers on pelvis are placed symmetrically (blue colored markers). However, the anybody markers on pelvis tilt immediately when the kinematic analysis is started (red colored markers). Still we are unable to find the reason.
We also notice some issues with the foot,
plantar aspect is not leveled with the ground, heel is initially raised (kindly check the attached figure in previous comment)
anybody heel markers seems to be moving 'down and up ' (from the initially raised position) during the analysis although the C3D markers remain stationary
We have tried to solve this by optimizing the markers and changing limb length of model, but the issue remains. Kindly provide us some direction/ solution.
Please note that the loading position is not necessarily the same as when you run the kinematic analysis, so it is normal to see a small shift in position when you start an analysis. How big this jump will be depends on how the initial positions has been defined, this jump has zero impact on the results, the initial position just need to be good enough to get the kinematic analysis started.
The model relies purely on the markers, if the foot is not correctly positioned you can adjust the sRelOpt values on the foot markers in the markerprotcol.any file. You can also try adding a higher weight to the heel marker to ensure it follow more closely the recorded marker. It can also be a sign of that the model has large marker errors, but as i understand your post you did already do parameter optimization on the model.