Hi! I have a question regarding the different Series on this graphic! What are those Series? What are they refering to? I am working on the SeatedHuman Model!
Best regards,
Best regards,
Hi Beatriz,
Welcome to the forum!
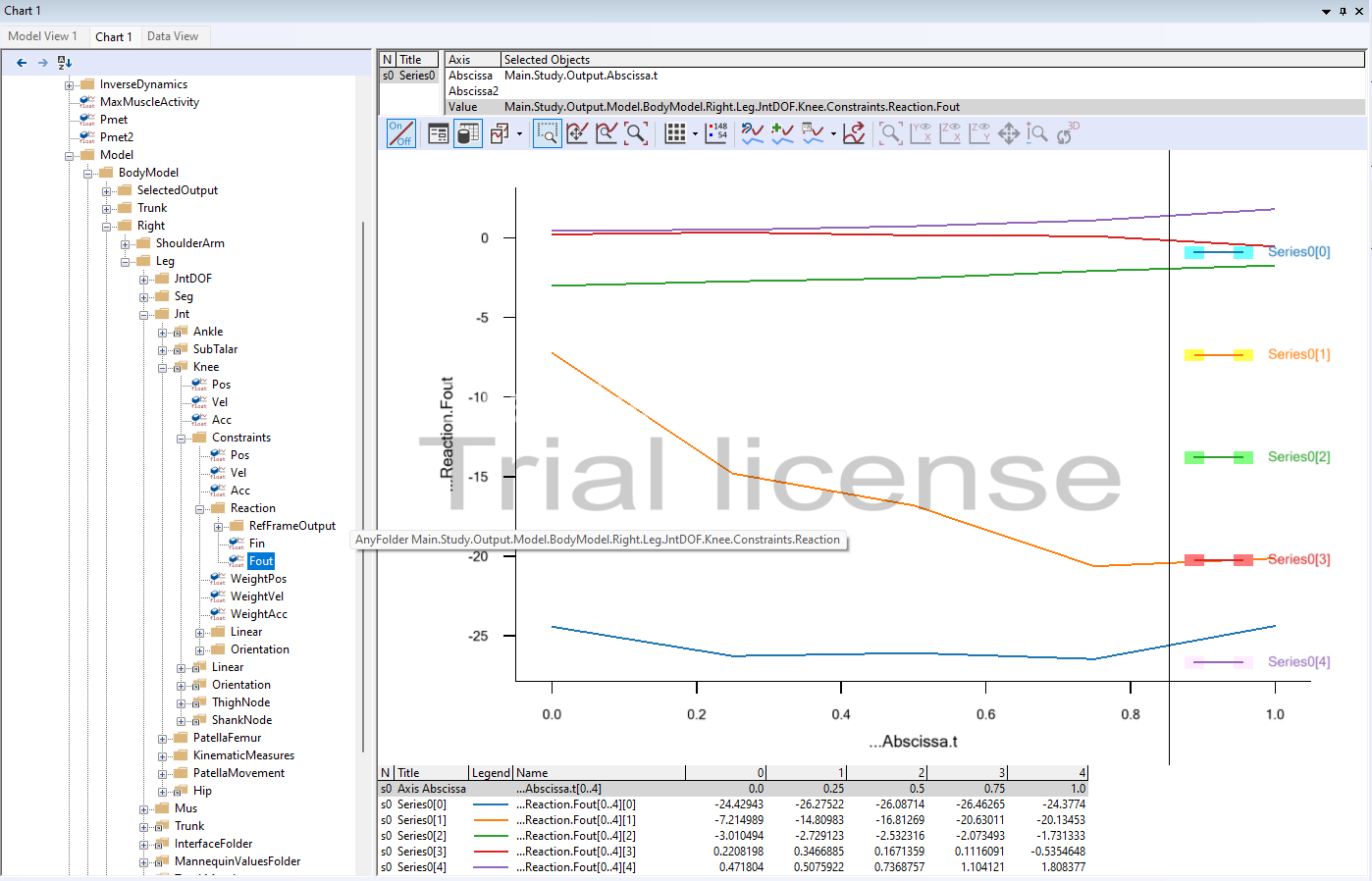
It looks like you have plotted the reaction force in the knee joint. In the standard model, the knee joint is modelled as a revolute joint that has 1 degree of freedom and 5 constraints. What you have plotted is Fout of the reaction forces at these constraints. So you see 5 outputs and they correspond to the way the constraints are assembled in the joint. The first three would refer to linear constraints in x,y,z axes. The next 2 would be rotational reaction moments about the y and x axis (but not necessarily depending on how the rotational measure is defined). To be completely sure, you should always double check how the constraints are assembled in the model tree. Normally, they will be taken from the linear and rotational measures that are used to create the joint. Since Linear appears first, it will be linear constraints first and then rotational measures. Also, the default sequence of rotational measures is z,y,x (you can check that by expanding the Orientation folder and look for Axis1,Axis2,Axis3 - please note you will only see this in the Model tree and not in the Chart tree). The Axis for the joint is z, that is why reaction moments are in y and x. Another really important consideration is the way the rotational measure is defined. If you see AnyKinRotational in the reference manual, you can read a little bit more about the types of rotational measure. The output that you will see in Fout will depend on the type rotational measure used. So, it can be a little bit confusing.
What I would suggest you do is that you look for the outputs in RefFrameOutput. these are expressed in Global Reference Frame and then you can express them in the local reference frame by multiplying it with the Axes of your local reference frame.
Hope this helps your understanding.
Best regards,
Dave
This topic was automatically closed 125 days after the last reply. New replies are no longer allowed.