Dear Hamed,
1、Is reducing the weight of the joint driver to add this sentence in the driver?
WeightFun = {0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1};
AnyKinEqSimpleDriver rhythmT1T12 =
{
AnyKinMeasure& T11T12_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T11T12;
AnyKinMeasure& T10T11_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T10T11;
AnyKinMeasure& T9T10_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T9T10;
AnyKinMeasure& T8T9_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T8T9;
AnyKinMeasure& T7T8_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T7T8;
AnyKinMeasure& T6T7_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T6T7;
AnyKinMeasure& T5T6_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T5T6;
AnyKinMeasure& T4T5_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T4T5;
AnyKinMeasure& T3T4_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T3T4;
AnyKinMeasure& T2T3_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T2T3;
//AnyKinMeasure& T1T2_ref = Main.HumanModel.BodyModel.Trunk.Joints.Thorax.T1T2;
MeasureOrganizer = iarr(0, 3, 27)+0;
DriverPos = pi/180 * {-10,-10,-10,10,10,10,0,0,0,-0};
DriverVel = pi/180 * {0,0,0,0,0,0,0,0,0,0};
WeightFun = {0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1};
Reaction.Type = {OFF,OFF,OFF,OFF,OFF,OFF,OFF,OFF,OFF,OFF};
};
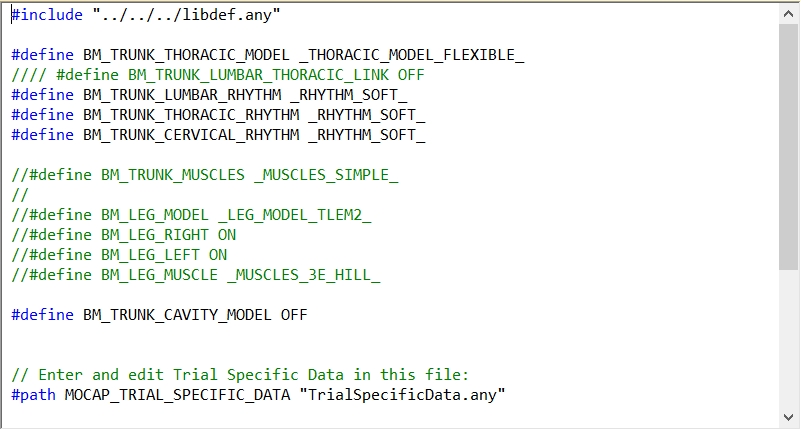
2、The hand is not very important to me, I have exclude the the HAND_LENGTH optimization in the LabSpecificData.any.
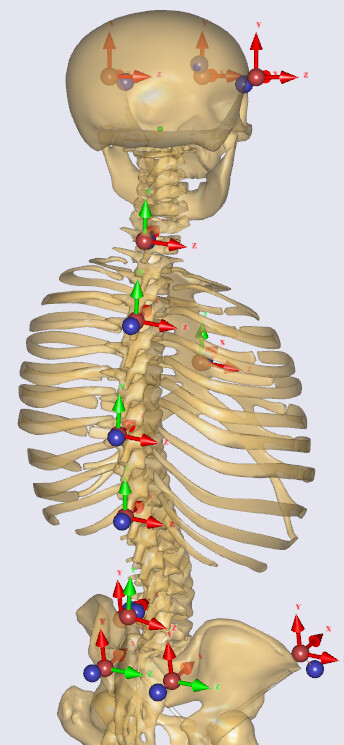
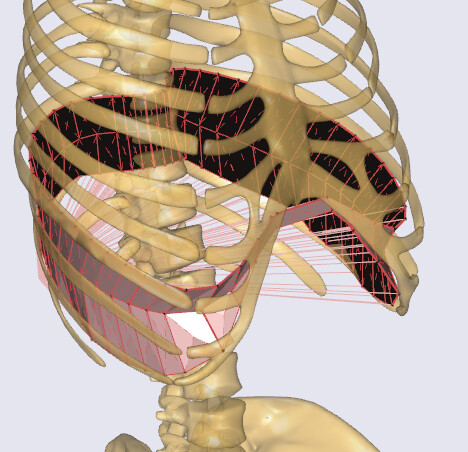
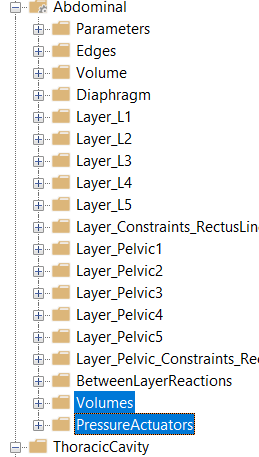
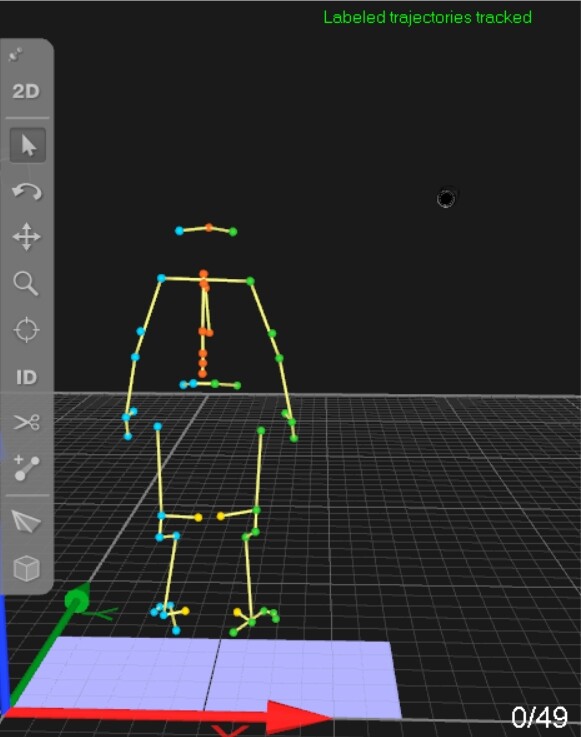
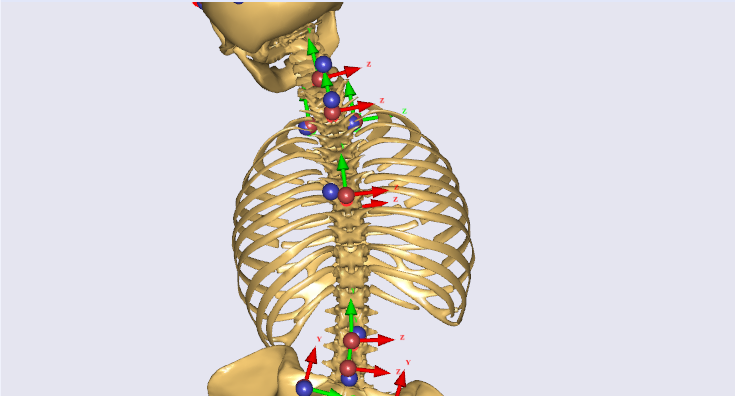
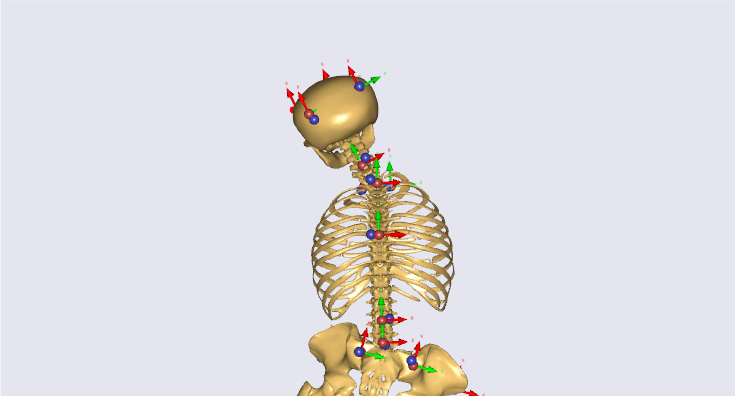
3、 I didn't add any extra things or extra codes. I all followed the standard sample project. The only change was that I transformed the thoracic vertebra model into a new one, but there is a problem when using this person's motion capture data (there was no problem when using the old thoracic vertebra model). At the same time, I observed the motion capture data in the laboratory and didn't see any problems.
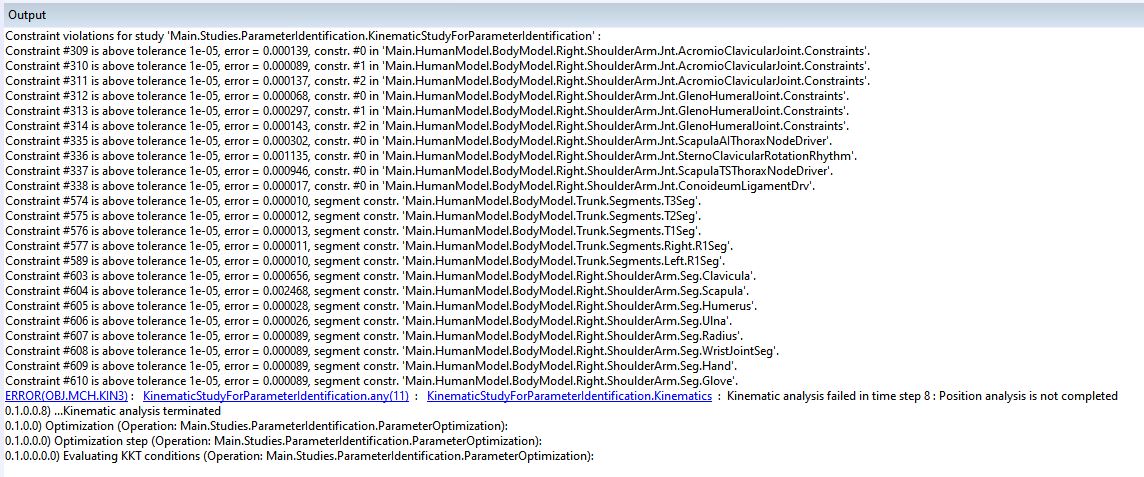
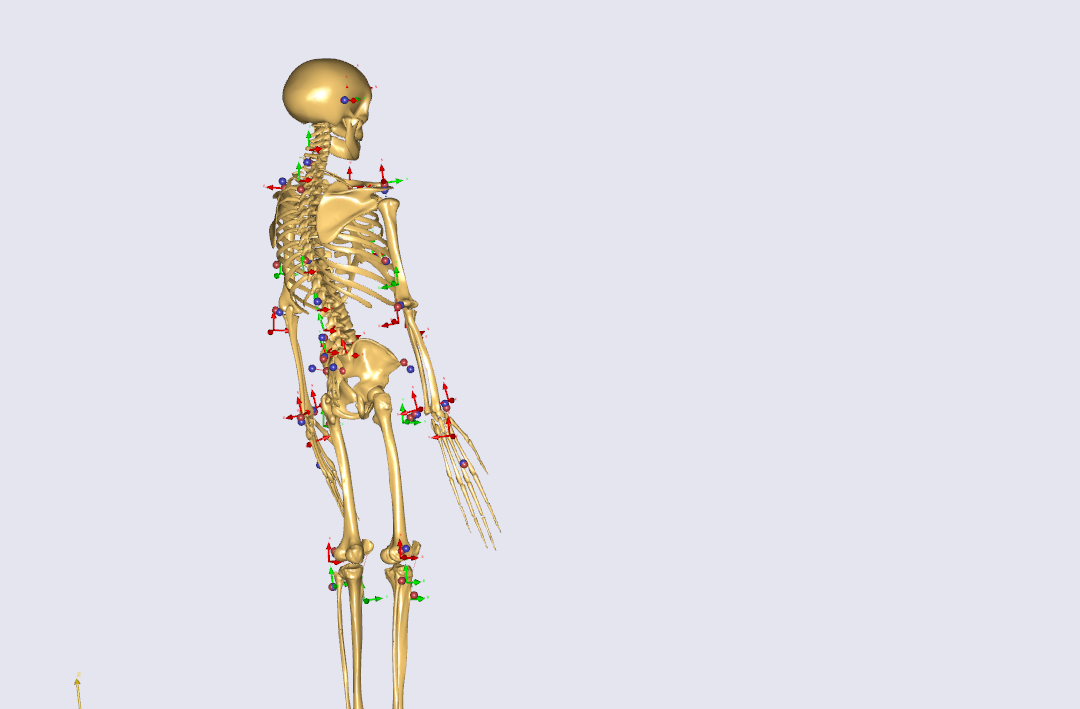
4、When I run "RunAnalysis" using the parameters of the static test, the error it reports is this.
1.0.1.0.0.1.0.0) Operation Sequence: (Operation: Main.ModelSetup.Views.SetViewMacros.KinematicView):
1.0.1.0.0.1.0.0.0) mcr (Operation: Main.ModelSetup.Views.SetViewMacros.KinematicView.mcr):
#### Macro command : mcr(1:1)> classoperation Main.ModelSetup.Views.KinematicView"Set View"
Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Failed to solve kinematic optimality conditions and hard constraints after 10 fallback attempts.
Constraint violations for study 'Main.Studies.MarkerTracking' :
Constraint #24 is above tolerance 0.001, error = 0.002505, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C1C0.Constraints'.
Constraint #98 is above tolerance 0.001, error = 0.001076, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Joints.Thorax.ExtensionRhythmDriver'.
Constraint #99 is above tolerance 0.001, error = 0.001072, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Joints.Thorax.ExtensionRhythmDriver'.
Constraint #100 is above tolerance 0.001, error = 0.001030, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.Joints.Thorax.ExtensionRhythmDriver'.
Constraint #108 is above tolerance 0.001, error = 0.001058, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Joints.Thorax.LumbarThroacicExtensionLinkDriver'.
Constraint #307 is above tolerance 0.001, error = 0.001582, constr. #1 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.SternoClavicularJoint.Constraints'.
Constraint #309 is above tolerance 0.001, error = 0.001147, constr. #0 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.AcromioClavicularJoint.Constraints'.
...
Constraint #652 is above tolerance 0.001, error = 0.044642, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.WristJointSeg'.
Constraint #653 is above tolerance 0.001, error = 0.041818, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Hand'.
Constraint #654 is above tolerance 0.001, error = 0.041818, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Glove'.
Constraint #655 is above tolerance 0.001, error = 0.001180, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Foot.Talus'.
Constraint #656 is above tolerance 0.001, error = 0.001863, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Foot'.
Constraint #657 is above tolerance 0.001, error = 0.001734, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Shank'.
Constraint #658 is above tolerance 0.001, error = 0.004457, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Thigh'.
Constraint #659 is above tolerance 0.001, error = 0.002302, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Patella'.
ERROR(OBJ.MCH.KIN3) : AnyMocapModel.any(77) : MarkerTracking.InitialConditions : Kinematic analysis failed in time step 0 : Position analysis is not completed
1.0.1.0) Kinematic analysis...
Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Kinematic solver fallback: Restarting solution of kinematic optimality conditions and hard constraints.Failed to solve kinematic optimality conditions and hard constraints after 10 fallback attempts.
Constraint violations for study 'Main.Studies.MarkerTracking' :
Constraint #0 is above tolerance 1e-06, error = 0.000207, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.T1C7.Constraints'.
Constraint #1 is above tolerance 1e-06, error = 0.000010, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.T1C7.Constraints'.
Constraint #2 is above tolerance 1e-06, error = 0.000173, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.T1C7.Constraints'.
Constraint #3 is above tolerance 1e-06, error = 0.000135, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C7C6.Constraints'.
Constraint #4 is above tolerance 1e-06, error = 0.000426, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C7C6.Constraints'.
Constraint #5 is above tolerance 1e-06, error = 0.000311, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C7C6.Constraints'.
Constraint #6 is above tolerance 1e-06, error = 0.000248, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C6C5.Constraints'.
Constraint #7 is above tolerance 1e-06, error = 0.000422, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C6C5.Constraints'.
Constraint #8 is above tolerance 1e-06, error = 0.000555, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C6C5.Constraints'.
Constraint #9 is above tolerance 1e-06, error = 0.000233, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C5C4.Constraints'.
Constraint #10 is above tolerance 1e-06, error = 0.000124, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C5C4.Constraints'.
Constraint #11 is above tolerance 1e-06, error = 0.000659, constr. #2 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C5C4.Constraints'.
Constraint #12 is above tolerance 1e-06, error = 0.000164, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C4C3.Constraints'.
Constraint #13 is above tolerance 1e-06, error = 0.000386, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.Joints.Cervical.C4C3.Constraints'.
...
Constraint #653 is above tolerance 1e-06, error = 0.041818, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Hand'.
Constraint #654 is above tolerance 1e-06, error = 0.041818, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Glove'.
Constraint #655 is above tolerance 1e-06, error = 0.001180, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Foot.Talus'.
Constraint #656 is above tolerance 1e-06, error = 0.001863, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Foot'.
Constraint #657 is above tolerance 1e-06, error = 0.001734, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Shank'.
Constraint #658 is above tolerance 1e-06, error = 0.004457, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Thigh'.
Constraint #659 is above tolerance 1e-06, error = 0.002302, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Patella'.
ERROR(OBJ.MCH.KIN3) : AnyMocapModel.any(77) : MarkerTracking.Kinematics : Kinematic analysis failed in time step 0 : Position analysis is not completed
1.0.1.0) ...Kinematic analysis terminated
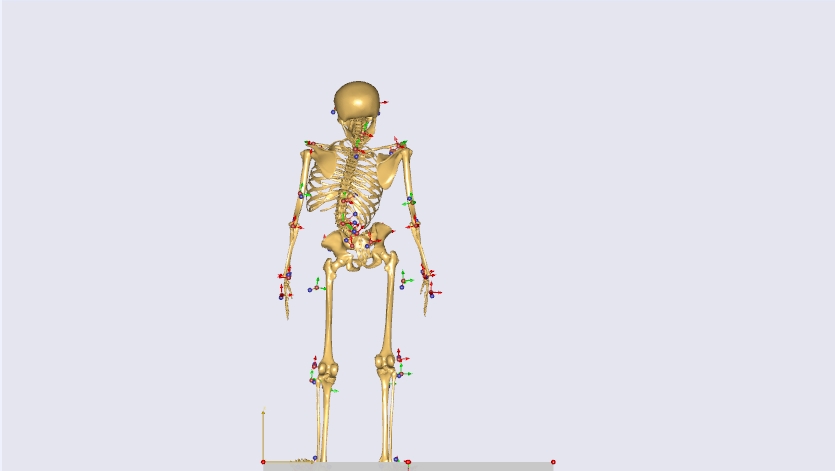
When running "RunAnalysis" with the parameters obtained from the dynamic test, there will not be such an error.(By the way,there was no problem when using the old thoracic vertebra model)