Hello, I have been studying vibration recently. I tried to modify the SeatedHuman Demo by adding AnyKinEqFourierDriver function on the seatseg.and studying the force of muscles under the vibration along the Y axis. Now I modify the constraint and drive in the environment file,
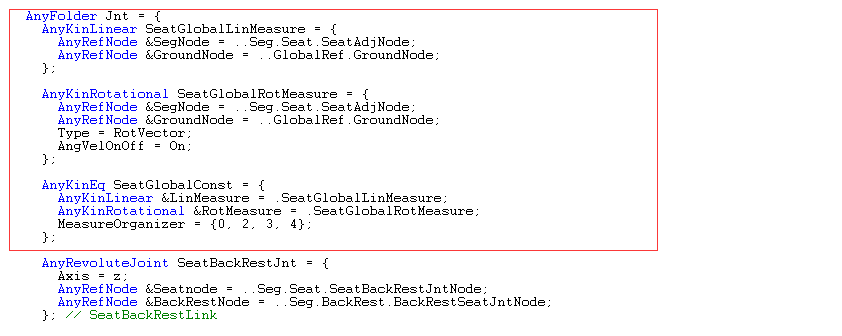
The previous constraints were as follows:
AnyFolder Jnt = {
AnyKinLinear SeatGlobalLinMeasure = {
AnyRefNode &SegNode = ..Seg.Seat.SeatAdjNode;
AnyRefNode &GroundNode = ..GlobalRef.GroundNode;
};
and perform inverse kinematics to meet the constraint conditions,
but the model became very strange.How do I define this driver and constraint? THANK YOU for YOUR support
Please describe what you mean by strange it is kinematics or kinetics?
Secondly i can see you have added a vibration driver to the seat but did you also remove a equivalent driver from the model otherwise it will be kinematically overdetermined. and it would not solve.
Hi Soren,
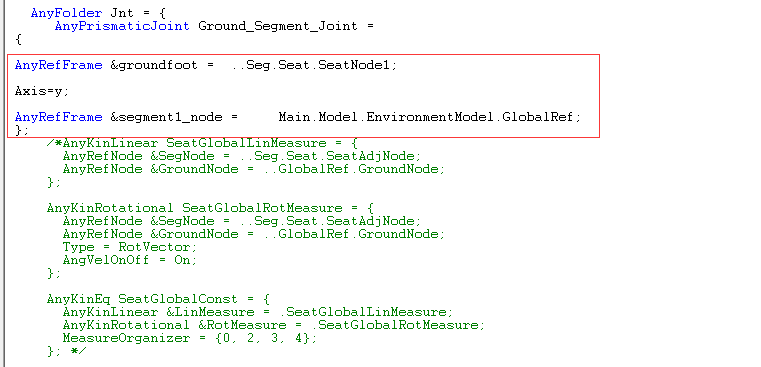
According to your previous reply and the guidance of the tutorial, I modified the model file. Using the original Seatedhuman Demo, I deleted the drive and constraint of the seatSeg, and changed the constraint function to move only along the Y-axis, and changed the driving function to the Fourier function that vibrating along the Y-axis.The code changes are as follows:
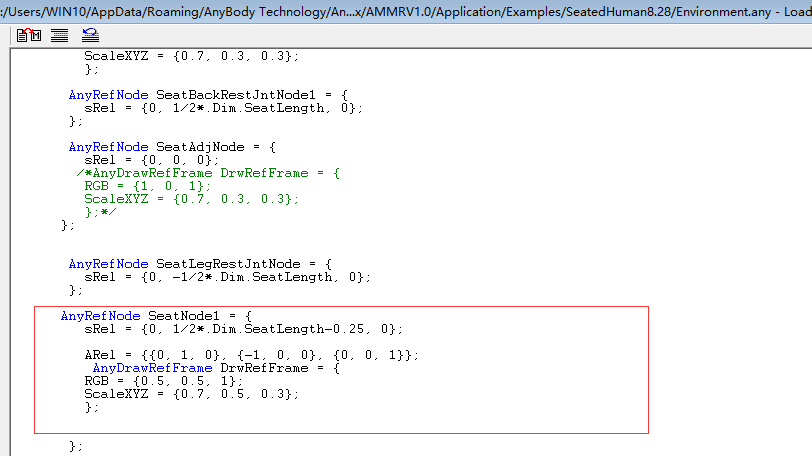
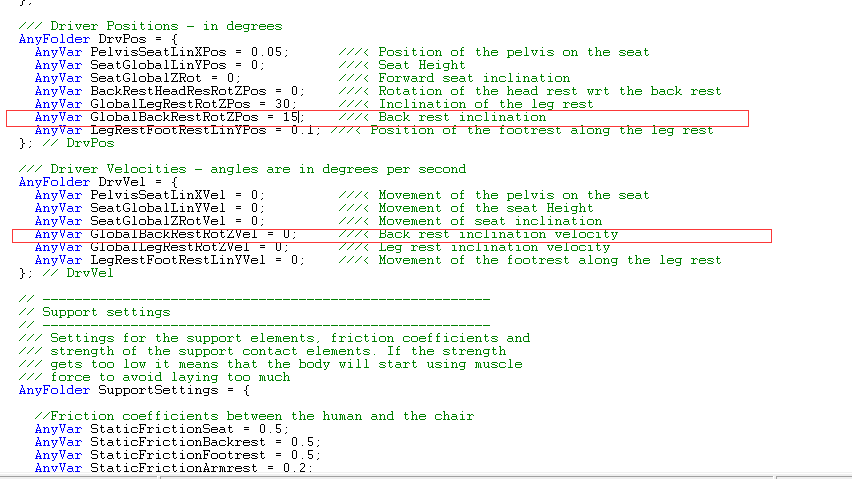
First define a point on the seat that points in the same y direction as the ground coordinate system:
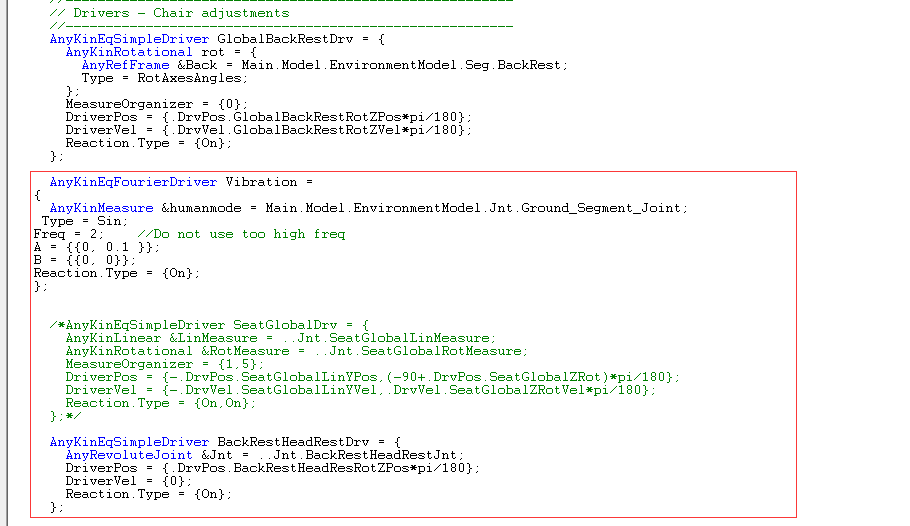
Since I want to explore the force of the human body in the sitting position when the Angle of the back is fixed at 15° and the seatSeg is vibrating, I modify the main document as follows:
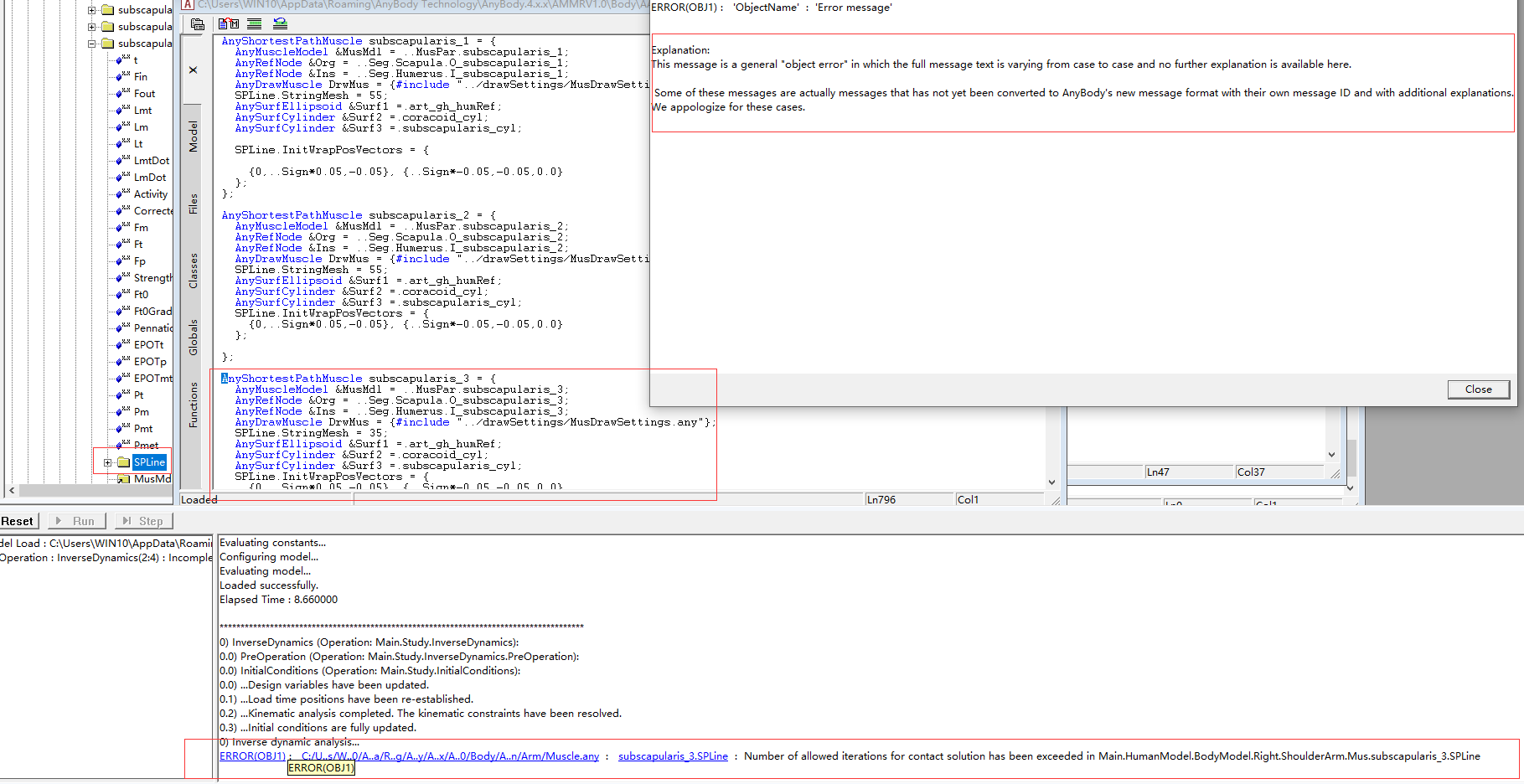
This is muscle wrapping issue, the modifications you did to the drivers etc. seems to make it run ok, but the muscle path could not be determined correctly for this muscle.
If you have access to the newest AMS version 7.3 the cure is simple since it has a new muscle wrapping algorithm which is both much faster and more reliable. It can be enabled using this statement in your main file.
Main ={
System.Compatibility.AnyBody73_ExperimentalShortestPathSolver = On;
};
Note also that this requires AMMR 2.3, since modifications has been made to several muscles.
See this message for more details
Best regards
Søren
Alternatively the simplest thing to try is to increase the variable "StringMesh" in the muscle, this may help the muscle to converge.
Please also see this section of the wiki which describes solutions for this.
Hi,Soren,
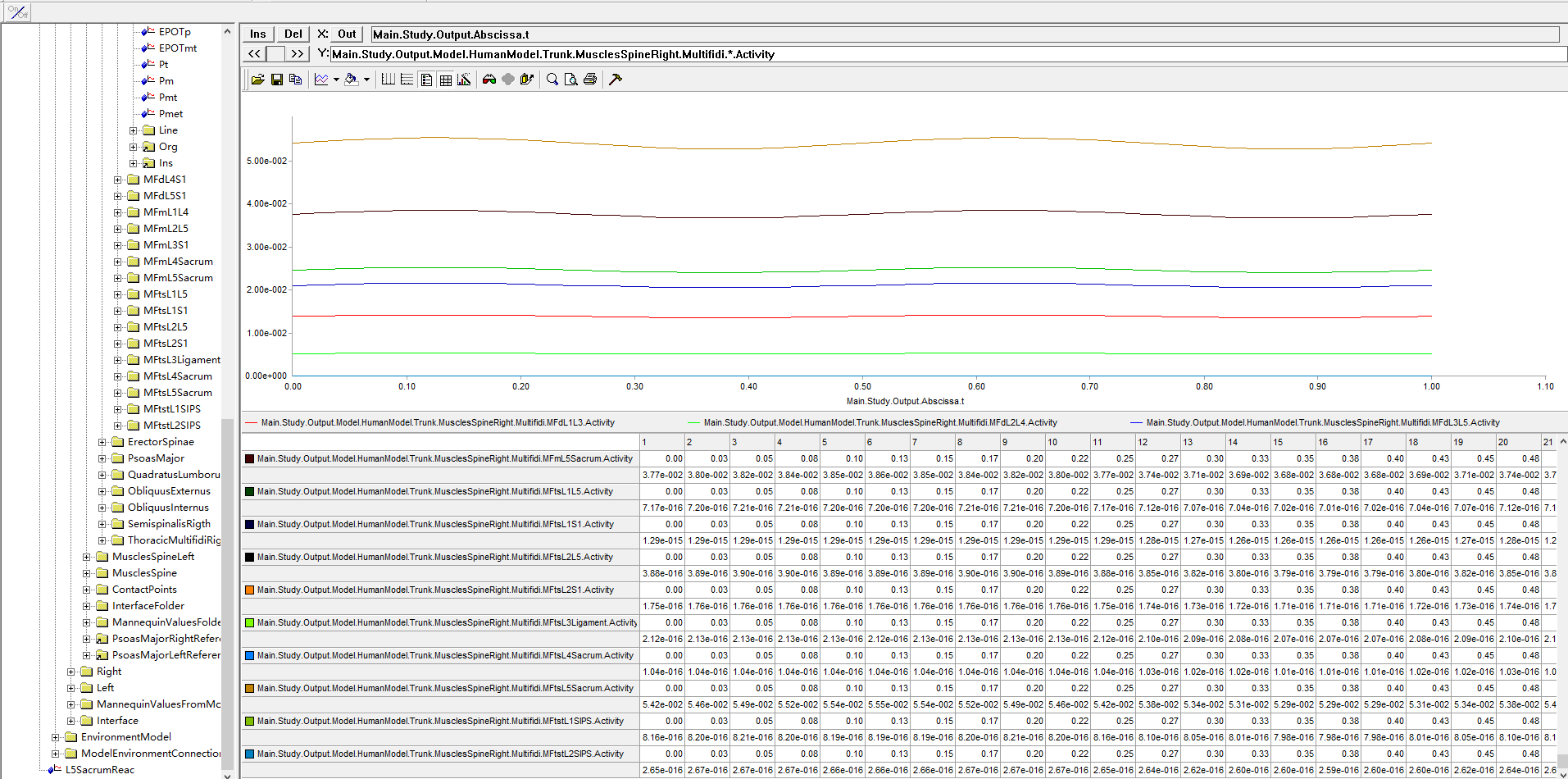
According to your advice I basically settled the problem of adding vibration function, now I have a question, about the abdomen muscles' activation. For example, Multifidi muscle, I noticed this muscle is divided into many blocks, when performing the inverseDynamics, The results are as follows:
if want to know Multifidi muscle's activation , How can I do? to take the average of all the values?or to add up all the values, or to take the maximum of all values?or to take the square root of the sum? or by any other algorithm?
Could you tell me how to solve it?
Best regards
zhong
Hi,Soren
Thank you for your answer. I wonder if it is possible to directly define the function in the script to get the maximum activation of the muscle group without exporting the data comparison. For example ,if I want to know the maximum activation of the Multifidi.Could you tell me what can i do achieve this ?
Best regards
Zhong