We are developing a leg-swing protocol utilizing a custom rig designed to stabilize the subject's trunk. However, we have some issues with the post-processing.
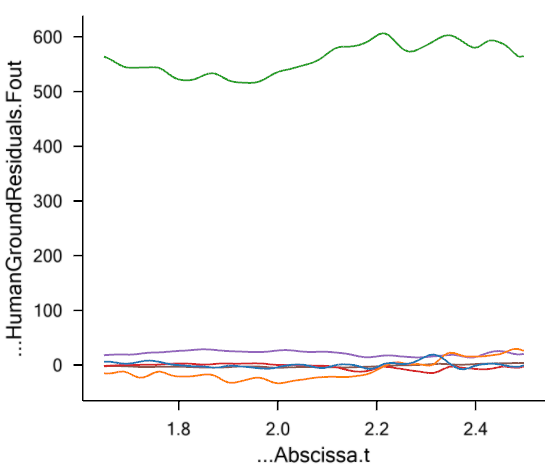
The experiment involves a subject supported by a trunk rig, standing on one leg on the top of a block. The block is positioned on a 1-axis force plate. The subject performs a forward and backward leg swing. We have successfully modeled the kinematics of a leg swing experiment in AMS, but the Inverse Dynamics is giving some trouble. While the system detects contact (InContactOnOff =1), the ankle and knee reaction forces are staying very low and the human-ground residuals are as large as the measured ground reaction forces. Setting MOCAP_HUMAN_GROUND_RESIDUALS to "PelvisWeak" only redistributes the forces without achieving proper muscle recruitment/joint reaction forces.
I am not sure exactly on the answer but here are some thoughts:
You are writing this is a 1-axis force-plate, if this means that the force is only measured in vertical and nothing else, our standard force-plates will not work out of the box. By default they will construct a segment representing the plate and then apply all the forces measured to the this plate, which is then transmitted to the foot. If only one axis is measured and the rest is zero it will simply apply this measured vertical force. What you really needed in this case would have been a force plate with reactions on the directions which was not measured in combination with the applied force on the vertical direction. This however do not explain that the leg seem to feel no applied loads, I would have expected this setup resulting in very high muscle activations.
By any chance is the force plate not included into the inverse dynamic study?
Though I do not understand why the current model does not have high muscles forces I suggest this solution, which I think you will need eventually.
Create a massless segment representing the force-plate
Constrain it using a prismatic joint with vertical as the open axis
Drive it to zero pos (no reaction applied)
Apply the measure force to this plate
Setup GRF prediction between foot and this plate
This setup will allow you to apply the measured vertical force and predict the other force components so that the CoP will be reasonable.
Alternatively you may modify the existing force plate to have reactions on the all directions except vertical.
Hope it helps you solve the problem, otherwise please write again.