Hello!
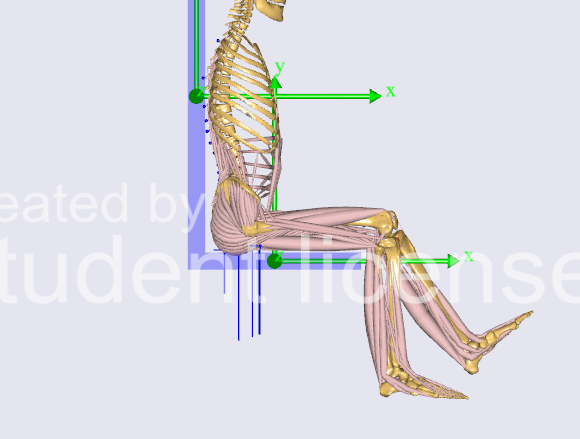
I'm struggling with a (supposedly) simple static, sitting human model. I have defined conditional contacts to represent a seat and a backrest. The body is driven to a position by drivers, defined in a Mannequin file and the kinematics runs without any problems. The problem occurs when I run the InverseDynamic analysis, more specifically I get a problem with "overloaded muscle configuration" (see attached picture). It is apparent from the figure that the muscle recruitment algorithm has found an optimal solution where it puts all the reaction forces at 2 nodes but somehow at the same time overstrains the muscle creating the "overloaded muscle configuration" warning. Have I understood the root of the problem correctly? I have also gathered following observations:
-
Other contact nodes are within the "contact cylinder" but are not activated through the algorithm. It kind of makes sense, since the algorithm finds a global optimal solution but it's strange to me that an optimal solution also involves overstraining a muscle.
-
The backrest is not activated at all but judging from the posture, it makes sense that the person is supported only by the seat.
-
I have looked through the activation of body muscles and they seem to be within reasonable intervals.
-
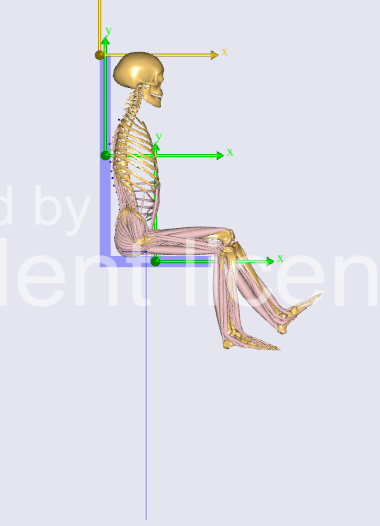
I've tried to lower the strength of the contact muscles from 10000 all the way to 1 in order to penalize the activation. Between 10000 and >1 the support force only changes the contact node. Strength=1 gives somehow a better distribution but the muscles are still overloaded, see picture 2.
All in all, I could use some help/suggestions on how to get a better distribution and to not overload the muscle configuration in my model. Also a follow up question, does "strength" has a unit or what does strength represent in general?