Hi Anybody,
I am trying to model an Exosuit that actuates the hip joint. The exosuit has a wire that works as an external muscle, which means shortening this wire pulls the attachment points towards each other. To model this wire, I calculated the wire stiffness using the wire length (the distance between markers at the attachment points) and force in the wire and fitted a 2nd-degree trendline.
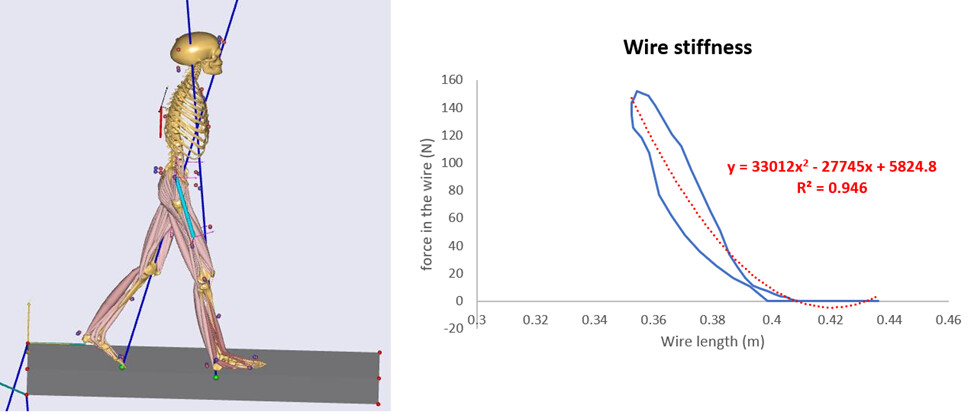
I used AnyForce to model the actuation wire. FR1 and FR4 are the markers on the origin and insertion of the wire.
AnyForce LateralBand_R = {
AnyKinPLine ExoBand ={
AnyRefNode &Ori = Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.PelvisSeg.ExotendonOrigin_R;
AnyRefNode &Ins = Main.HumanModel.BodyModel.Right.Leg.Seg.Thigh.ExotendonInsertion_R;
AnyDrawPLine Draw = {
Opacity = 1;
Thickness = 0.02;
RGB = {0, 0.9, 1};
};
};
// A + B.x + C.x^2 ...
AnyFloat A = 5824.8;
AnyFloat B = -27745;
AnyFloat C = 33012;
// // Estimate the length of the band //
AnyVar R14 = vnorm (Main.ModelSetup.C3DFileData.Points.Markers.FR1.PosInterpol(t) - Main.ModelSetup.C3DFileData.Points.Markers.FR4.PosInterpol(t));
AnyFunPolynomial ForceR = {
PolyCoef = {.A, .B, .C};
};
F = -{ForceR(R14)};
};
This is the model result for the wire force compared to the actual force:
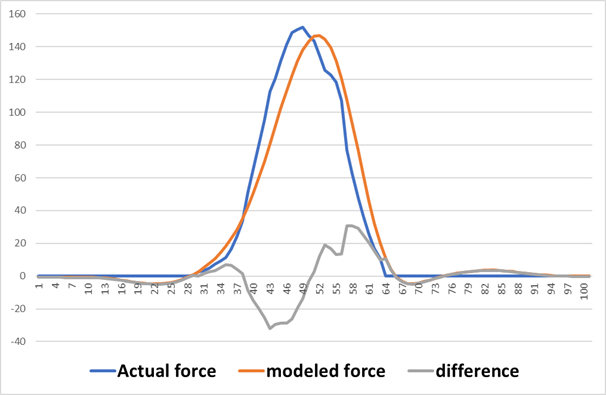
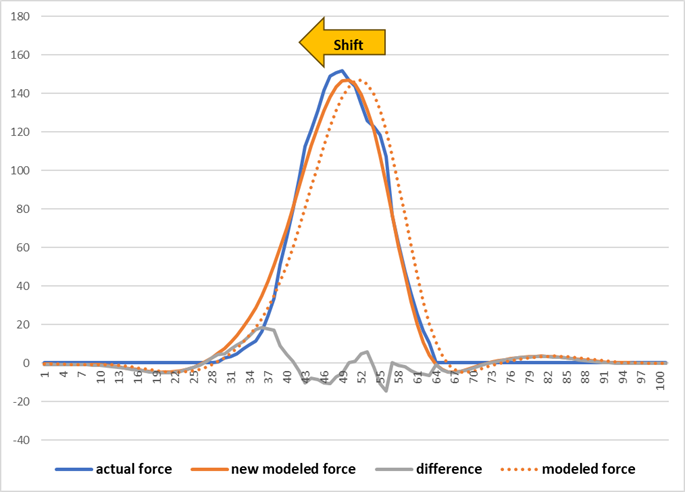
You can see the difference is considerable. I want to understand if this is the most optimal approach for modeling the wire's force. Also, how can I do this if I want to slightly alter the temporal aspect while modeling the wire's force? What I mean is that the model acts like the newly modeled force, as shown here. In this way, the difference between the modeled and actual forces is lower.
I appreciate your help.
Best regards,
Ali