Dear Sir,
Hope you have a nice day.
The Anybody version that I use now is 7. 1. 2. 6044 (64-bit version), and the AMMR version is v2.1.1.
Once I have used Anybody v6.0, but when first seeing the new v7.0 interface, I feel strange with it.
I met many problems when learning the new version, and need your help.
Now I want to know the correct analysis sequence for Plug-in-gait_Simple model.
Shall I run RunParameterIdentification first, then RunAnalysis (MarkerTracking + InverseDynamics) ?
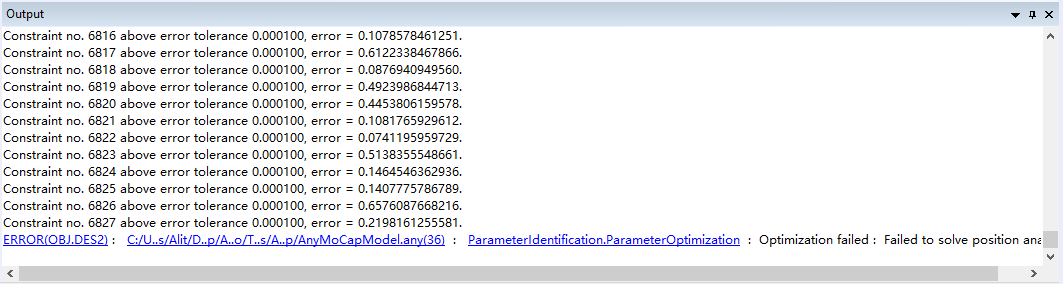
And I found that if I run RunParameterIdentification first, it’s easily to meet some errors, the optimization failed.
Please help confirm the question above.
Thanks in advance.