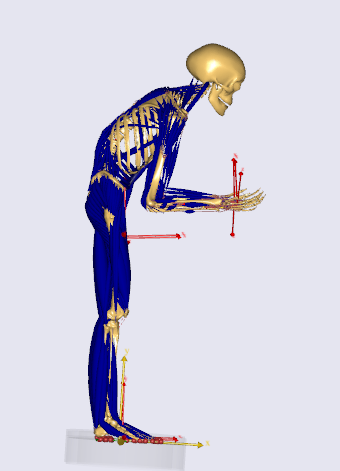
I built a standing model by adapting the initial posture and inserting AnyForces on RefNodes of the thighs and wrists (both in horizontal direction). Those are my measured forces and now I want to solve the kinetics to quantify the musculoskeletal loading during this pushing task. The Problem is that I get a Muscle Recruitment solver error when running the analysis.
So I figured out that I need to define (high) torques at the wrist in some directions so that AnyBody solves the force equilibrium. But in reality, I almost had a horizontal force at the hand without any rotation.
Can you guess why my model is not able to solve this static posture?
Basically in such a situation the posture is adopted to be able to stay in balance while providing the pushing force. If the pushing force is large he will need to lean further forward and similarly if he should create a pulling force he would have to lean backward.
In the newest version of AMMR we have released a model named SrtandingPosturePredictionWithLoad it can be used to simulate situations very much like this. It will adopt the posture according to the applied loads in the hands. This model can however not yet incorporate loads applied on the thighs but this would also be possible to add to it. see posture prediction model
If you want to modify your own model it would create a driver for the CoM and drive this to a more forward position to ensure he is not tipping backwards, this is essentially what the posture prediction model would do automatically.
Thanks Søren, this is exactly what I need.
Is it possible to replace the box (including the vertical forces) of the StandingPosturePredictionWithLoad with simple self-defined horizontal AnyForces?
Yes, the model is customizable you can alter the applied loads it does not need to be vertical. You can apply a 3D force vector or a weight or both at the same time, but it can not apply the load on the thighs out of the box but it would be possible to add. The models works by knowing the applied force, so it has to be applied like in a specific way otherwise the motion drivers will not realize it. So if you just add some extra forces manually it will change muscle activations but not the posture.
Ok I got it when I had a closer look at the model.
Can you give me further Information how or rather where I have to insert my thigh forces in the model so that my defined forces have an impact on the body posture?
After having thought about it a bit more, i think it will require you to alter the AnyScript Class used for creating the balance. This class assumes one external force being applied either in one hand or shared evenly between hands, it has not been designed to have multiple force application points yet, there is nothing preventing this though we just did not do that yet. Honestly i think you might have a hard time to do this yourself, this code is rather advanced, and i am also afraid it might take a little while before we will be able to release an updated model for this.
I think you might still use the model as it is and apply the forces in the hands, and then manually apply the forces to the thighs, then the model will not change motion as a consequence of thigh forces but it might still be in balance if these forces are not too big.