Hi,
when I read this document(ContactSurfaceDistanceAndVelocityDepLinPush.any), I find some functions.
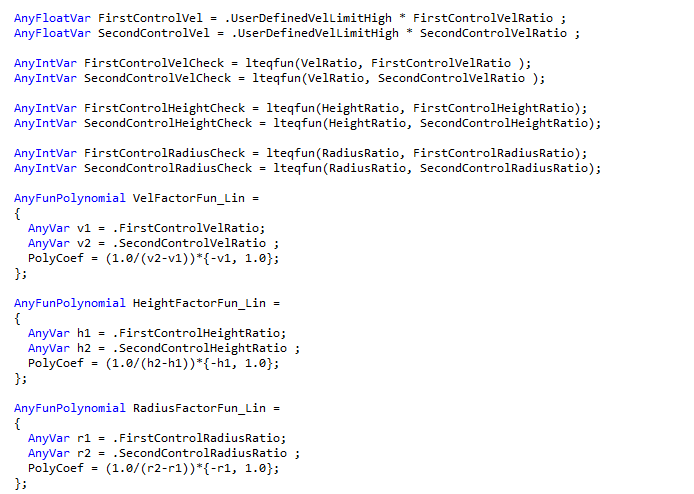
However, I didn't get the physical meaning of VelFactorFun_Lin. Could you share with me the physical meaning or purpose of it? Thanks!
Best,
TJ
Hi,
when I read this document(ContactSurfaceDistanceAndVelocityDepLinPush.any), I find some functions.
Best,
TJ
Hi TJ,
The purpose of these functions is to smoothen the transition at the edge of the contact detection zone. Well, this is the reason for height and radius factor function. But likewise, there is a velocity threshold for contact detection. The two objects must have a relative velocity lower than the threshold velocity for the contact to be detected. The function is used for smoothing the transition at the threshold instead of a sharp switch between on and off. I would recommend you read the references on Ground Reaction Force prediction from Fluit et al. 2014, Skals et al. 2017. for more details on this.
Best,
Dave
Great! After I read your explanation and paper I think I have a better understanding of this. Thanks for your impressive work!
Best,
TJ
This topic was automatically closed 125 days after the last reply. New replies are no longer allowed.