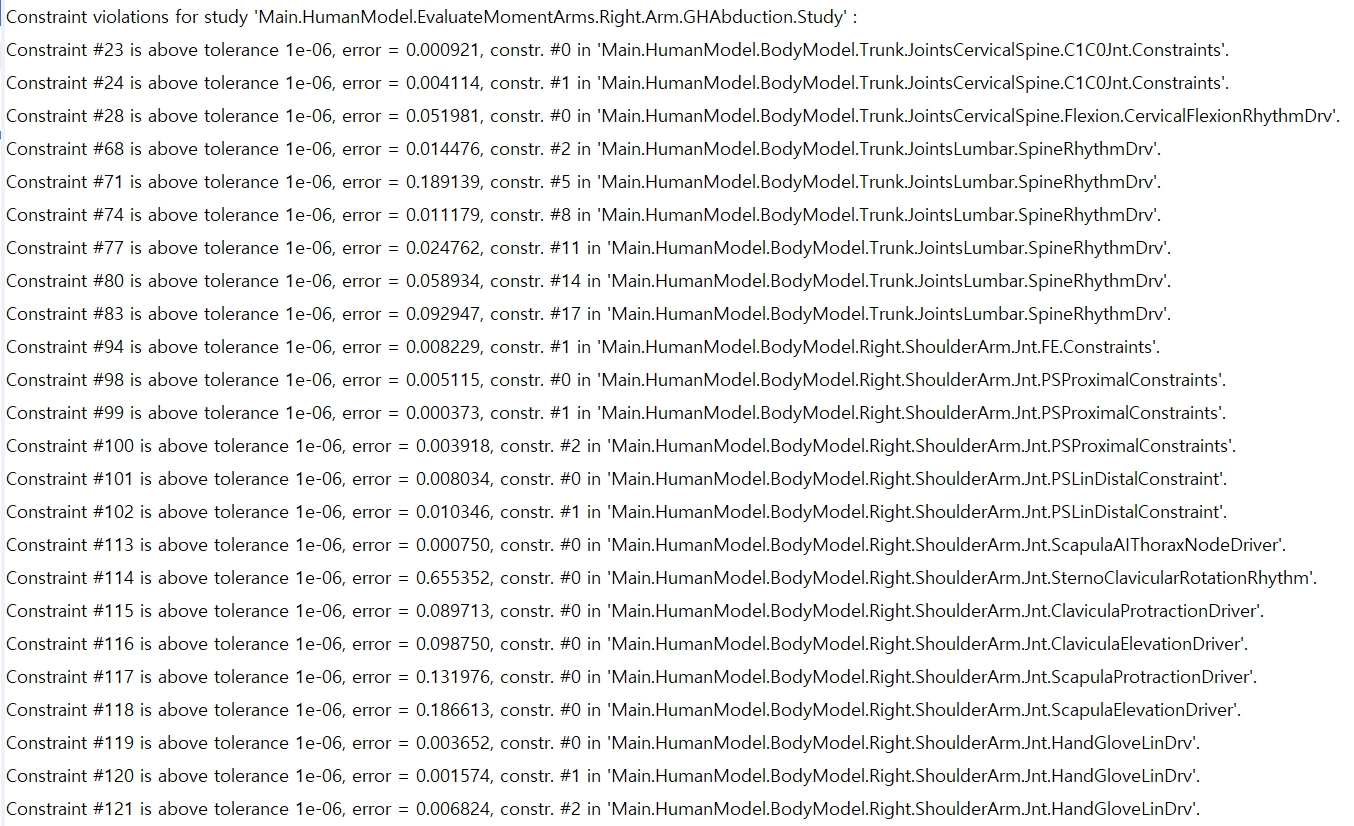
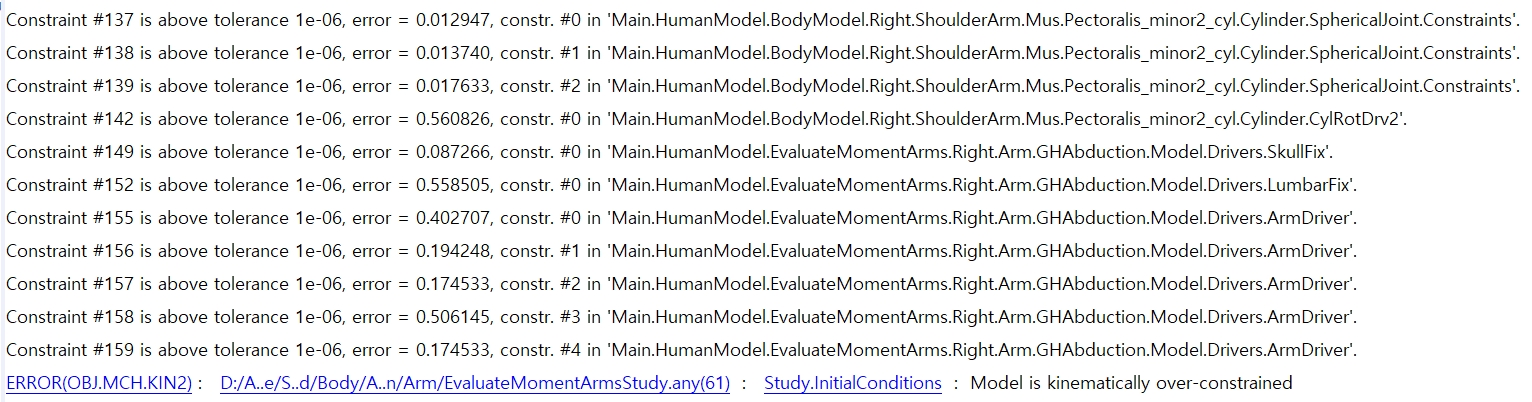
The problem is indeed the shoulder rhythm, the moment arm study is by itself kinematically determined, it has all divers it needs, so adding the shoulder rhythm makes it overdetermined.
We now plan to add a warning on this and a mech object exclude to remove any rhythm from the momentarm study.
Having the rhythm on in the moment arm study is not so meaningful since it will make several DOF move simultaneously. The moment arm study works by moving one DOF at the time. You can change the other DOF to have a different constant value but it needs to be constant.
I tried to make an upper-extremity model excluding the left arm. Therefore, the parameters were changed related to them (ex. upper arm length, fore arm length..).
By the way, I deleted the previous .anyset file then made a new file. For that reason, the results were changed what I expected.
Currently, I've studied "evaluating moment arms" in AnyBody. And I'm wondering why the angular velocity of joints has to be set 1?
Furthermore, why LmtDot can display as the moment arm in AnyBody? Is LmtDot the current length between a joint center and muscle?
It sounds good that you are making progress!
Regarding your questions, I am a little unsure of what you mean about:
"...the angular velocity of joints has to be set 1?"
As to your question about the LmtDot of the muscles, it is the rate of length change of the total muscle-tendon unit (i.e. the velocity).
Here is a link to find valuable information regarding all the Muscle Output parameters.
The LmtDotIt is not displayed as the moment arm in AMS but it is part of calculating it.
You can find the calculation in the EvaluateMomentArmsStudy.any file located in your AMMR under \Body\AAUHuman\Arm\EvaluateMomentArmsStudy.any
Yes exactly, when setting velocity to 1 LmtDot displays moment arm.
Note that it is important for biarticular muscles that the other joint has a fixed position.