I have some problems in Inverse Dynamics Operation in GRF Model. The error is Muscle recruitment solver : solver aborted after maximum number of iterations
I found some similar problems and your answer is below or you can just see the link:
[ul]
[li] Direction of gravity is it specified correctly? this needs to be correct in two places the Gravity property of the study in the labspecific data and in the defintion of the forceplates. I have also noticed the forceplates was rotated wrongly.
[/li][li] In the file Forceplate_GRFprediction.any try to increase the property LimitDistHigh, this controls when contact can occur to if the number is higher the foot do not need to be as close to the ground. see also LimitVelHigh it controls speed limit.
[/li][li] The acceleration of the model could be the reason if your data are not filtered correctly
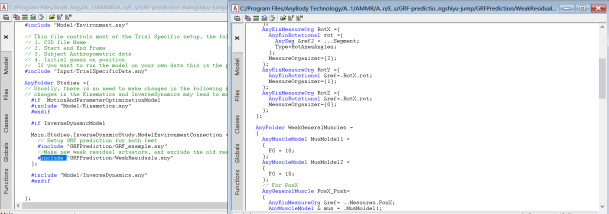
[/li][li] The model is using a weak residual to the ground that helps holding the balance in the model if the feet contact are not enough, this is defined in the file “Tools/GRFPrediction/Weakresidual.any” here you can increase the strength of the artificial muscles
[/li][/ul]
As my error show before the model contact the plate, So I am wondering the problem may be solved according to your third and fourth answers above. But as for the fourth answer, I can not find the artifical muscles in that fine as you can see in the picture.
Thank you.
It is likely to be due to too weak residual muscles if the problem occur while the person is in the air with both feets?
To increase the weak residual muscle strength increase the F0 values in muscmodel1 +2 as you already found in the weakresidual file, these strengths are used to construct artificial muscles, this can be seen if you scroll a little down in the same file.
Thank you.
It fails when the model is on the air with two feet and I will try later.
I have the measured forceplate data. What I want to do now is to not use the GRF datas in forceplate and predict the GRF. And then I will compare the GRF and other results between the two models, one complishes the inverse dynamics with forceplate data and the other which uses GRF Prediction.
As for the Mo_Cap Model in GRF_Prediction which ends incompletely, I find the MaxMuscleActivity is over 1 and reach over 30 in most times. As I have adjusted the normal direction to Z and increase the LimitDistHigh,what may be the proper reason and method?
I run the inverse dynamic ok now. But the MaxMuscleActivity is also over 1.
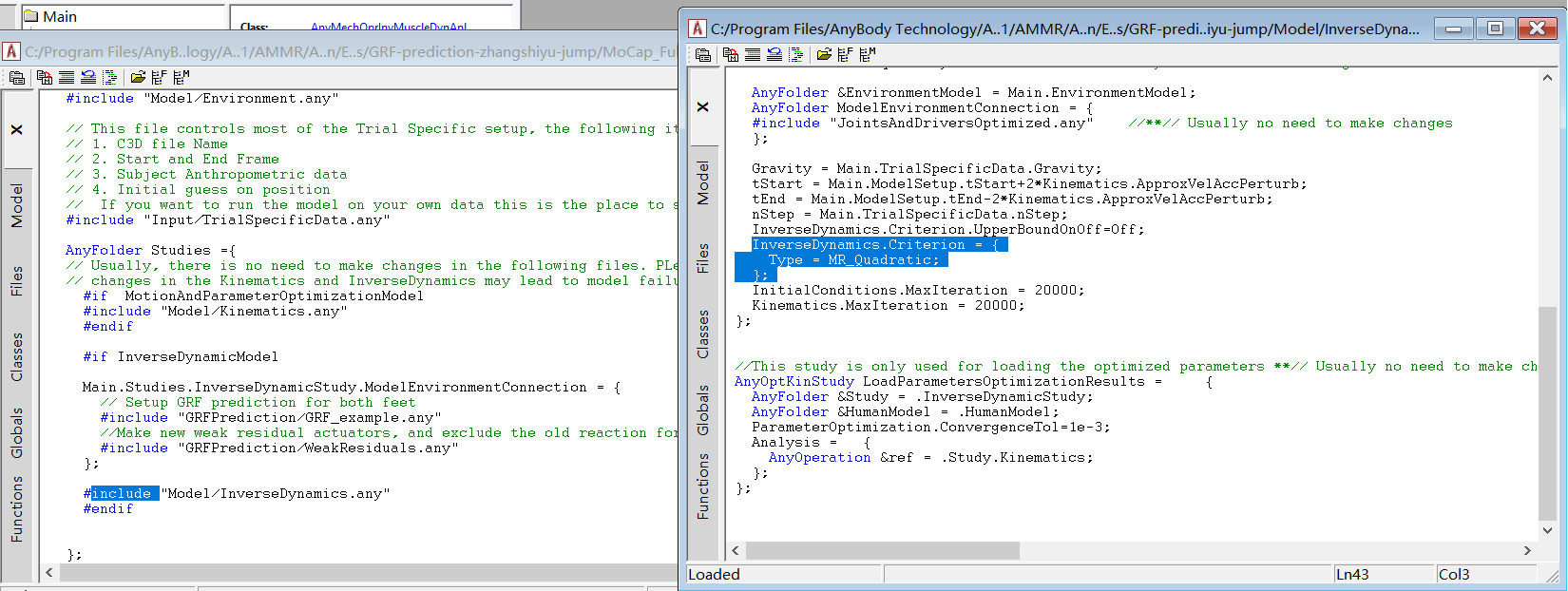
I do not understand "change the order of the polynomial criteria in muscle recruitment from 3 to 2.".
As you can see above, I just add the 3 lines and I could not find the order and where to change it. As for the link which talks about the tutorials, I can not find the location from it also.
Would you please tell me some details? And I hope this may help solve the large MuscleActivity problem. Thank you.
InverseDynamics.Criterion = {
Type = MR_Polynomial;
Power = 2;
};
I do not understand if the link to the tutorial is not working for you i just tested it again.
Concerning the high activation in the GRF prediction model i think this is because the model has no contact to the plates…this would explain it.
If you run the model in the AMMR you will see the spheres ont he foot chaning color/opacity when they come close to the plates, please check that you see the same. If they are all transparent the contact is not detected and you will see high activations.
Please check the following things in the model
Normal direction setting in the force plate for the conditional contact
Gravity definition in the model
Settings for the contact to the ground like you already have been looking into