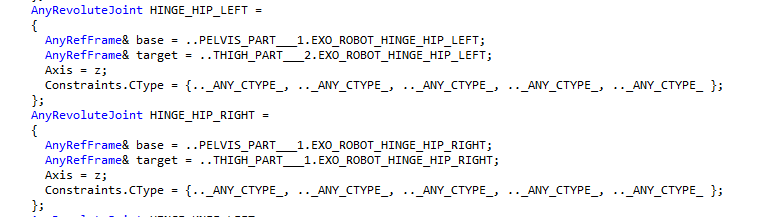
Hi, nowadays I’m working on the human-exoskeleton model. I have a question about the modeling of constraints. I find the author already build AnyRevoluteJoint shown in the following picture, but we also need to build a AnyKinMeasureOrg of it. I want to know the difference between these two constraints. Thank you!
I not completely sure I understand you question here.
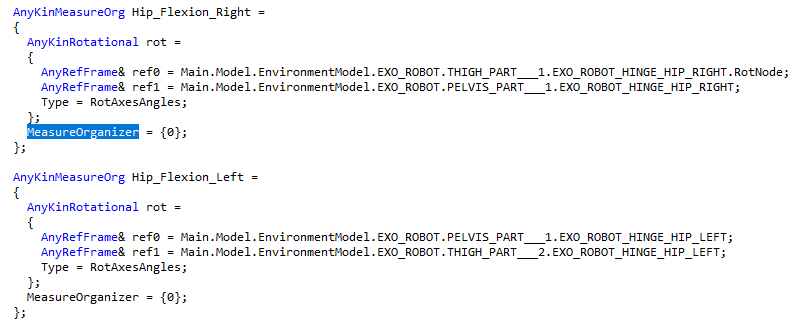
I suspect the reason why the code you reference also has the AnyKinMeasreOrg contructs is to extract the joint angles with the correct sign for the output. The right side references a sub reference frame called RotNode.
Otherwise, they could have just used the outputs of the two revolute joints directly.